b,
де
- Главная
- Разное
- Дизайн
- Бизнес и предпринимательство
- Аналитика
- Образование
- Развлечения
- Красота и здоровье
- Финансы
- Государство
- Путешествия
- Спорт
- Недвижимость
- Армия
- Графика
- Культурология
- Еда и кулинария
- Лингвистика
- Английский язык
- Астрономия
- Алгебра
- Биология
- География
- Детские презентации
- Информатика
- История
- Литература
- Маркетинг
- Математика
- Медицина
- Менеджмент
- Музыка
- МХК
- Немецкий язык
- ОБЖ
- Обществознание
- Окружающий мир
- Педагогика
- Русский язык
- Технология
- Физика
- Философия
- Химия
- Шаблоны, картинки для презентаций
- Экология
- Экономика
- Юриспруденция
Методи розв’язування СЛАР (Система лінійних алгебраїчних рівнянь) презентация
Содержание
- 1. Методи розв’язування СЛАР (Система лінійних алгебраїчних рівнянь)
- 2. МЕТОДИ РОЗВ’ЯЗУВАННЯ СЛАР Методи чисельного розв’язування СЛАР
- 4. ПРЯМІ МЕТОДИ РОЗВ’ЯЗУВАННЯ СЛАР МЕТОД
- 5. МЕТОД ГАУССА
- 6. МЕТОД ГАУССА Виключаючи послідовно невідомі із початкової
- 7. МЕТОД ГАУССА Метод Гаусса має сигнальну функцію
- 8. Матрицею перестановок P називається квадратна матриця,
- 9. З системи Ax = b маємо
- 10. Метод Гаусса відповідає розкладанню матриці A на
- 11. LU-розкладання матриці А
- 12. Приклад
- 13. Схема Холецького Самостійно: розглянути метод Холецького. Метод
- 14. Обчислення det(A) на основі LU-розкладу матриці det(A)=
- 15. Для обчислення оберненої матриці необхідно розв’язати n
- 16. Обчислення A-1 Знаючи розклад
- 17. РОЗВ’ЯЗУВАННЯ ПЕРЕВИЗНАЧЕНИХ СИСТЕМ РІВНЯНЬ Припустимо, що система
- 18. ТОЧНІСТЬ РОЗВ’ЯЗКУ СЛАР 6,1 x 1
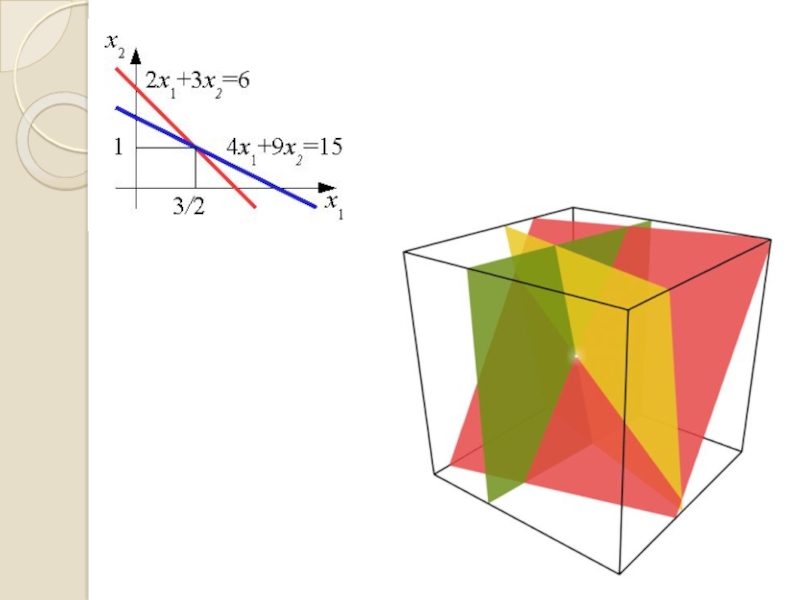
- 19. Графічна ілюстрація для систем рівнянь з погано обумовленою матрицею
- 20. Норми векторів Норма lp ||x||p =
- 21. Норми матриць Норма lp
- 22. ВЛАСТИВОСТІ НОРМ векторів: ||x|| ≥ 0
- 23. ЧИСЛО ОБУМОВЛЕНОСТІ Нехай x* − точний розв’язок,
- 24. ЧИСЛО ОБУМОВЛЕНОСТІ Припустимо, що (A + δA)(x*
- 25. ОЦІНКА ПОХИБОК Похибка обчислення оберненої матриці
- 26. ТОЧНІСТЬ РОЗВ’ЯЗКУ СЛАР 6,1 x 1

Слайд 2МЕТОДИ РОЗВ’ЯЗУВАННЯ СЛАР
Методи чисельного розв’язування СЛАР діляться на дві групи:
прямі та
ітераційні.
В прямих (або точних) методах розв’язок x системи знаходиться за скінчену кількість арифметичних дій (методи Гаусса, LU-розкладання, прогонки, Халецького и т.д). Якщо матриця неособлива, тобто
то x = A-1b, де A-1 − обернена матриця.
A A-1 = A-1 A = E
Ітераційні методи полягають в тому, що розв’язок x системи знаходиться як границя послідовних наближень x(k) при k→∞, де k − номер ітерації (Якобі, Зейделя, варіаційного типу).
В прямих (або точних) методах розв’язок x системи знаходиться за скінчену кількість арифметичних дій (методи Гаусса, LU-розкладання, прогонки, Халецького и т.д). Якщо матриця неособлива, тобто
то x = A-1b, де A-1 − обернена матриця.
A A-1 = A-1 A = E
Ітераційні методи полягають в тому, що розв’язок x системи знаходиться як границя послідовних наближень x(k) при k→∞, де k − номер ітерації (Якобі, Зейделя, варіаційного типу).
")
Слайд 4ПРЯМІ МЕТОДИ РОЗВ’ЯЗУВАННЯ СЛАР
МЕТОД ГАУССА
Прямий хід методу Гаусса полягає
в послідовному виключенні невідомих x1,x2,…,xn з системи. Якщо то поділивши перше рівняння системи на отримаємо:
де
Помножимо це рівняння на і відніматимемо отримане рівняння від i-го рівняння системи. Після виключення x1 з решти рівнянь отримаємо:
де
Помножимо це рівняння на і відніматимемо отримане рівняння від i-го рівняння системи. Після виключення x1 з решти рівнянь отримаємо:

Слайд 5МЕТОД ГАУССА
Коефіцієнти системи обчислюються за формулами:
Обчислення правих частин системи здійснюється за
формулами:

Слайд 6МЕТОД ГАУССА
Виключаючи послідовно невідомі із початкової системи отримуємо систему рівнянь Cx
= y:
Зворотній хід полягає в знаходженні невідомих :
Зворотній хід полягає в знаходженні невідомих :

Слайд 7МЕТОД ГАУССА
Метод Гаусса має сигнальну функцію виду (поліноміальний):
Елемент
називається ведучим елементом на k-му кроці виключення. Основним обмеженням методу є припущення, що всі елементи відмінні від нуля. Щоб зменшити похибку ведучим необхідно вибирати найбільшим за модулем елемент.
: Елемент називається ведучим елементом на")
Слайд 8
Матрицею перестановок P називається квадратна матриця, у якої в кожному рядку
і в кожному стовпці наявний лише один відмінний від нуля і рівний одиниці елемент.
Елементарною матрицею перестановок Pki називається матриця, отримана з одиничної матриці перестановкою k-го і i-го рядків. Наприклад, елементарними матрицями перестановок третього порядку є матриці:
Добуток двох (а отже, і будь-якої кількості) елементарних матриць перестановок є матрицею перестановок (не обов’язково елементарною).
Матрицю PkiA отримують із матриці A перестановкою k-го і i-го рядків.
Матрицю APki отримують із матриці A перестановкою k-го і i-го стовпців.
Метод Гаусса з вибором головного елемента по стовпцю еквівалентний звичайному методу Гаусса, який застосовують до системи
Елементарною матрицею перестановок Pki називається матриця, отримана з одиничної матриці перестановкою k-го і i-го рядків. Наприклад, елементарними матрицями перестановок третього порядку є матриці:
Добуток двох (а отже, і будь-якої кількості) елементарних матриць перестановок є матрицею перестановок (не обов’язково елементарною).
Матрицю PkiA отримують із матриці A перестановкою k-го і i-го рядків.
Матрицю APki отримують із матриці A перестановкою k-го і i-го стовпців.
Метод Гаусса з вибором головного елемента по стовпцю еквівалентний звичайному методу Гаусса, який застосовують до системи

Слайд 9З системи Ax = b маємо Cx = y
Можна показати
b та y пов’язані між собою як
Dy = b, де матриця D має вигляд:
З y = D-1b
Маємо Cx = D-1b ⇒ DCx = b ⇒ A = DC
З y = D-1b
Маємо Cx = D-1b ⇒ DCx = b ⇒ A = DC

Слайд 10 Метод Гаусса відповідає розкладанню матриці A на добуток двох трикутних матриць:
A
= LU (L = D, U = C)
тобто
Якщо det A ≠ 0, то існує матриця перестановок P така, що справедливе розкладання
тобто
Якщо det A ≠ 0, то існує матриця перестановок P така, що справедливе розкладання



Слайд 13Схема Холецького
Самостійно: розглянути метод Холецького.
Метод Холецького використовується для розв’язування СЛАР з
симетричними матрицями ( )

Слайд 14Обчислення det(A) на основі LU-розкладу матриці
det(A)= det(LU)= det(L) det(U) =
Розв’язування СЛАР
на основі LU-розкладу матриці
Розкладання матриці A = LU
Розв’язування системи Ly = b
Розв’язування системи Ux = y
Розкладання матриці A = LU
Розв’язування системи Ly = b
Розв’язування системи Ux = y
Обчислення det(A) та розв’язування СЛАР
 на основі LU-розкладу матриці det(A)= det(LU)= det(L) det(U) =Розв’язування СЛАР на основі LU-розкладу матриціРозкладання")
Слайд 15Для обчислення оберненої матриці необхідно розв’язати n систем лінійних алгебраїчних рівнянь
виду:
A Z(j)= δ(j), j=1,n
де
Z(j) − j-й стовпчик оберненої матриці,
δ(j) − j-й стовпчик одиничної матриці.
A Z(j)= δ(j), j=1,n
де
Z(j) − j-й стовпчик оберненої матриці,
δ(j) − j-й стовпчик одиничної матриці.
Обернена матриця − це матриця, для якої
AA-1 = E
= δ(j), j=1,nдеZ(j)")

Слайд 17РОЗВ’ЯЗУВАННЯ ПЕРЕВИЗНАЧЕНИХ СИСТЕМ РІВНЯНЬ
Припустимо, що система
Ax = b
має матрицю A розмірністю
m× n (m > n).
Така система має безліч розв’язків, але можна вибрати серед них таке, що мінімізує нев’язку розв’язку ε = b – Ax.
Початкова перевизначена система зводиться до так званої нормальної форми
(ATA)x = Cx = ATb
Звідки
x = (ATA)-1ATb
Матриця С = ATA розмірністю (n × n) неособлива,
якщо стовпці матриці A незалежні.
Така система має безліч розв’язків, але можна вибрати серед них таке, що мінімізує нев’язку розв’язку ε = b – Ax.
Початкова перевизначена система зводиться до так званої нормальної форми
(ATA)x = Cx = ATb
Звідки
x = (ATA)-1ATb
Матриця С = ATA розмірністю (n × n) неособлива,
якщо стовпці матриці A незалежні.

Слайд 18ТОЧНІСТЬ РОЗВ’ЯЗКУ СЛАР
6,1 x 1 + 3,4 x 2 =
6,1
14,7 x 1 + 8,2 x 2 = 14,7
x 1= 1; x 2 = 0.
6,1 x 1 + 3,4 x 2 = 6,101 14,7 x 1 + 8,2 x 2 = 14,7 x 1= 1,205; x 2 = -0,3675.
6,101 x 1 + 3,4 x 2 = 6,1 14,7 x 1 + 8,2 x 2 = 14,7 x 1= 0,829875; x 2 = 0,304979.
6,1 x 1 + 3,4 x 2 = 6,101 14,7 x 1 + 8,2 x 2 = 14,7 x 1= 1,205; x 2 = -0,3675.
6,101 x 1 + 3,4 x 2 = 6,1 14,7 x 1 + 8,2 x 2 = 14,7 x 1= 0,829875; x 2 = 0,304979.


Слайд 20Норми векторів
Норма lp
||x||p = (|x1|p + |x2|p +…+|xn|p)1/p
Евклидова норма
||x||2
= (|x1|2 + |x2|2 +…+|xn|2)1/2
Норма l1 ||x||1 = (|x1| + |x2| +…+|xn|)
Норма l ||x|| = max {|x1|,|x2|,…,|xn|)
i
Норма l1 ||x||1 = (|x1| + |x2| +…+|xn|)
Норма l ||x|| = max {|x1|,|x2|,…,|xn|)
i
1/p Евклидова норма ||x||2 = (|x1|2 +")

Слайд 22ВЛАСТИВОСТІ НОРМ
векторів:
||x|| ≥ 0
||x|| = 0 лише для x = 0
||
c x|| = |c| ||x|| для всіх комплексних чисел c
||x + y|| ≤ ||x|| + ||y||
матриць:
||A|| ≥ 0
||A|| = 0 лише для A=0
|| c A|| = | c | ||A|| для всіх комплексних чисел c
||A + B|| ≤ ||A|| + ||B||
||AB|| ≤ ||A|| ||B||
||x + y|| ≤ ||x|| + ||y||
матриць:
||A|| ≥ 0
||A|| = 0 лише для A=0
|| c A|| = | c | ||A|| для всіх комплексних чисел c
||A + B|| ≤ ||A|| + ||B||
||AB|| ≤ ||A|| ||B||

Слайд 23ЧИСЛО ОБУМОВЛЕНОСТІ
Нехай x* − точний розв’язок,
xн − обчислене (наближене) значення розв’язку,
δx
= (x* − xн) − похибка розв’язку.
ε = b − A xн − нев’язка розв’язку системи A x* = b.
Розглянемо випадок, коли
A(x* + δx) = b + δb,
звідки
δx = A-1δb.
Користуючись нормами , запишемо:
||δx|| ≤ ||A-1|| ||δb||,
||b|| ≤ ||A|| || x* ||
||δx|| ||b|| ≤ ||A-1|| ||δb|| ||A|| || x* ||.
ε = b − A xн − нев’язка розв’язку системи A x* = b.
Розглянемо випадок, коли
A(x* + δx) = b + δb,
звідки
δx = A-1δb.
Користуючись нормами , запишемо:
||δx|| ≤ ||A-1|| ||δb||,
||b|| ≤ ||A|| || x* ||
||δx|| ||b|| ≤ ||A-1|| ||δb|| ||A|| || x* ||.
||δx||
|| x* ||
≤
||A|| ||A-1||
||δb||
||b||
 значення розв’язку,δx = (x* − xн)")
Слайд 24ЧИСЛО ОБУМОВЛЕНОСТІ
Припустимо, що (A + δA)(x* + δx) = b.
Маємо
A δx
+ δA(x* + δx) = 0
− δx = A-1δA(x* + δx), ||δx|| ≤ ||A-1|| ||δA|| ||(x* + δx)||.
Звідки
− δx = A-1δA(x* + δx), ||δx|| ≤ ||A-1|| ||δA|| ||(x* + δx)||.
Звідки
||δx||
|| x* + δx||
≤
||A|| ||A-1||
||δA||
||A||
Число обумовленості cond (A) =
||A|| ||A-1||
(x* + δx) = b.МаємоA δx + δA(x* + δx)")
Слайд 25ОЦІНКА ПОХИБОК
Похибка обчислення оберненої матриці
||A-1 – (A + δA)-1||
||A -1||
≤
cond (A)
1
– cond (A) (||δA|| ||A||)
якщо ||δA|| ||A-1|| < 1.
||δA||
||A||
Похибка розв’язку системи
|| x* ||
≤
cond (A)
1 – cond (A) (||δA|| ||A||)
||δA||
||δx||
||A||
якщо ||δA|| ||A-1|| < 1.
||δb||
||δb||
+
(
)
-1||||A -1||≤cond (A)1 – cond (A) (||δA||")
Слайд 26ТОЧНІСТЬ РОЗВ’ЯЗКУ СЛАР
6,1 x 1 + 3,4 x 2 =
6,1
14,7 x 1 + 8,2 x 2 = 14,7
x 1= 1; x 2 = 0.
6,1 x 1 + 3,4 x 2 = 6,101 14,7 x 1 + 8,2 x 2 = 14,7 x1= 1,205; x 2 = -0,3675.
6,101 x 1 + 3,4 x 2 = 6,1 14,7 x 1 + 8,2 x 2 = 14,7 x 1= 0,829875; x 2 = 0,304979.
cond(A)=1.1908*104 |A| = 0.04
6,1 x 1 + 3,4 x 2 = 6,101 14,7 x 1 + 8,2 x 2 = 14,7 x1= 1,205; x 2 = -0,3675.
6,101 x 1 + 3,4 x 2 = 6,1 14,7 x 1 + 8,2 x 2 = 14,7 x 1= 0,829875; x 2 = 0,304979.
cond(A)=1.1908*104 |A| = 0.04