- Главная
- Разное
- Дизайн
- Бизнес и предпринимательство
- Аналитика
- Образование
- Развлечения
- Красота и здоровье
- Финансы
- Государство
- Путешествия
- Спорт
- Недвижимость
- Армия
- Графика
- Культурология
- Еда и кулинария
- Лингвистика
- Английский язык
- Астрономия
- Алгебра
- Биология
- География
- Детские презентации
- Информатика
- История
- Литература
- Маркетинг
- Математика
- Медицина
- Менеджмент
- Музыка
- МХК
- Немецкий язык
- ОБЖ
- Обществознание
- Окружающий мир
- Педагогика
- Русский язык
- Технология
- Физика
- Философия
- Химия
- Шаблоны, картинки для презентаций
- Экология
- Экономика
- Юриспруденция
Докладчик: Коков Астемир Асланович. Введение: Мультиагентный робот-сапер предназначен для автоматического мониторинга и защиты территорий по широкому. презентация
Содержание
- 1. Докладчик: Коков Астемир Асланович. Введение: Мультиагентный робот-сапер предназначен для автоматического мониторинга и защиты территорий по широкому.
- 2. Введение: Мультиагентный робот-сапер предназначен для
- 3. Преимущества автономного мобильного модуля мультиагентного робота-сапера:
- 4. Еще одно принципиальное отличие –
- 5. Среда разработки трехмерных твердотельных моделей SolidWorks:
- 6. Сборки SolidWorks:
- 7. В целом получается дешевое высокотехнологичное
Слайд 1Докладчик: Коков Астемир Асланович
Тема: “Конструкция автономного
мобильного модуля
мультиагентного робота-сапера”

Слайд 2Введение:
Мультиагентный робот-сапер предназначен для автоматического мониторинга и защиты территорий
по широкому спектру неблагоприятных факторов, главным образом от минно-диверсионной и террористических угроз.
К настоящему моменту рыночное предложение по системам автоматического разминирования не удовлетворяет спрос в силу сложности задач, возникающих при использовании традиционных технологий обследования местности, идентификации взрывоопасных объектов и их обезвреживания. Существующие системы автоматизированного разминирования отличаются низкой эффективностью и высокой стоимостью.
Поэтому проблема разминирования минных полей в нашей стране и в мире не решается десятилетиями.
К настоящему моменту рыночное предложение по системам автоматического разминирования не удовлетворяет спрос в силу сложности задач, возникающих при использовании традиционных технологий обследования местности, идентификации взрывоопасных объектов и их обезвреживания. Существующие системы автоматизированного разминирования отличаются низкой эффективностью и высокой стоимостью.
Поэтому проблема разминирования минных полей в нашей стране и в мире не решается десятилетиями.

Слайд 3Преимущества автономного мобильного модуля мультиагентного робота-сапера:
Одним из условий реализации
преимуществ мультиагентности робота является создание эффективной транспортной платформы мобильных модулей-агентов робота.
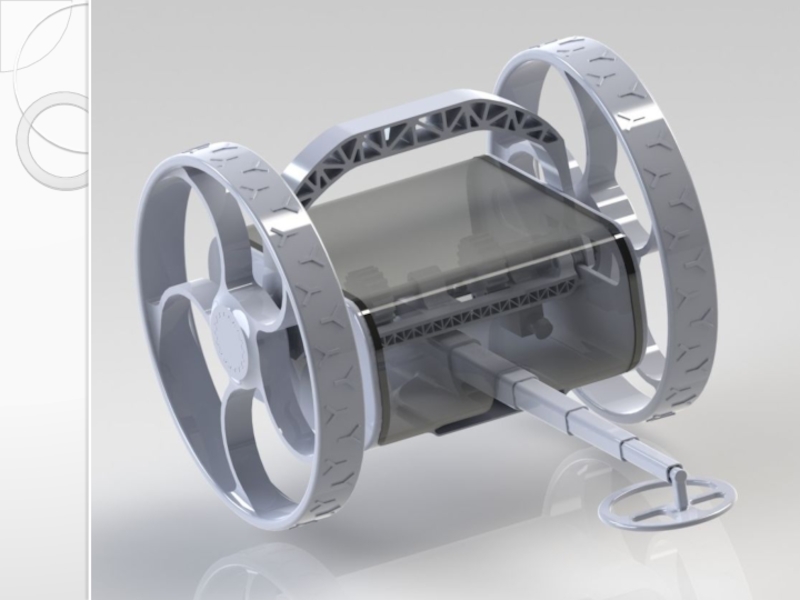
В нашей разработке используется двухколейная двухколесная транспортная платформа с динамическим управлением остойчивостью. Она отличается полным межколесным кинематическим соответствием и отсутствием избыточных связей в системе «местность-машина», что придает роботу высокую глобальную подвижность, управляемость и экономичность движения.
В нашей разработке используется двухколейная двухколесная транспортная платформа с динамическим управлением остойчивостью. Она отличается полным межколесным кинематическим соответствием и отсутствием избыточных связей в системе «местность-машина», что придает роботу высокую глобальную подвижность, управляемость и экономичность движения.

Слайд 4 Еще одно принципиальное отличие – магнитно- и электрически пассивная
конструкция модуля, выполняемого практически полностью из пластмассовых и композиционных материалов. Создаваемая нами конструкция ориентирована на поточное изготовление из пластмассовых штампованных деталей с последующей оснасткой приборами навигации и позиционирования.

Слайд 5Среда разработки трехмерных твердотельных моделей SolidWorks:
Детали, которые вы можете
наблюдать на экране были разработаны в программе для 3D моделирования SolidWorks. Объединив полученные детали между собой специальными взаимосвязями называемыми сопряжениями можно получить сборку.


Слайд 7 В целом получается дешевое высокотехнологичное легко тиражируемое изделие. Эти
качества нового робота позволят приступить к реальному тотальному разминированию противопехотных минных полей, значительно повысить противодиверсионную и контртеррористическую деятельность, контроль за состоянием внешней среды.
Результат: