режимі
- Главная
- Разное
- Дизайн
- Бизнес и предпринимательство
- Аналитика
- Образование
- Развлечения
- Красота и здоровье
- Финансы
- Государство
- Путешествия
- Спорт
- Недвижимость
- Армия
- Графика
- Культурология
- Еда и кулинария
- Лингвистика
- Английский язык
- Астрономия
- Алгебра
- Биология
- География
- Детские презентации
- Информатика
- История
- Литература
- Маркетинг
- Математика
- Медицина
- Менеджмент
- Музыка
- МХК
- Немецкий язык
- ОБЖ
- Обществознание
- Окружающий мир
- Педагогика
- Русский язык
- Технология
- Физика
- Философия
- Химия
- Шаблоны, картинки для презентаций
- Экология
- Экономика
- Юриспруденция
Якість управління. Показники якості процесу управління в динамічному та сталому режимі презентация
Содержание
- 1. Якість управління. Показники якості процесу управління в динамічному та сталому режимі
- 2. План лекції Якість процесу управління. Показники якості
- 3. Питання 1. Якість процесу управління.
- 4. Стійкість необхідна, але не достатня умова придатності
- 5. Якість процесу управління залежить не тільки від
- 6. Точність виконання цільової функції визначається помилкою управління:
- 7. Передаточна функція помилки що виникає під
- 8. Показники якості управління в динамічному режимі в
- 9. Питання 2. Показники якості в сталому режимі
- 10. стала помилка обумовлена дією на вхід системи
- 11. Теорема про кінцеве значення Зображення по
- 12. стала помилка по вхідному сигналу: помилка по швидкості
- 13. Система управління, що має сталу помилку називається
- 14. Питання 3. Якість процесу управління в перехідному режимі
- 15. Прямі показники: за характером затухання перехідний процес буває: монотонний; аперіодичний; коливальний.
- 16. Прямі показники: тривалість перехідного процесу tпп
- 17. Алгоритм визначення тривалості перехідного процесу за графіком
- 18. Прямі показники: перерегулювання (заброс):
- 19. показник коливальності: Непрямі показники визначаються по АЧХ замкнутої системи: резонансна частота полоса пропускання
- 20. В ТАУ можно выделить две характерные задачи:
- 21. Питання 4. Поняття закону регулювання
- 22. Закон регулювання – це конкретне правило формування
- 23. Закони регулювання П-закон (пропорційний закон регулювання)
- 25. Завдання на самопідготовку: Абрамов Ю.А. “Основы пожарной автоматики“ стор. 159-174

Слайд 2План лекції
Якість процесу управління.
Показники якості в сталому режимі.
Якість процесу управління в
перехідному режимі
Поняття закону регулювання
Поняття закону регулювання


Слайд 4Стійкість необхідна, але не достатня умова придатності САУ.
Якість процесу управління (умова
придатності САУ) – комплекс вимог, визначаючих поведінку системи в сталому та перехідному режимах:
точність;
швидкодія;
характер виконання цільової функції.
точність;
швидкодія;
характер виконання цільової функції.
 – комплекс")
Слайд 5Якість процесу управління залежить не тільки від властивостей системи, але й
від характеру зовнішніх впливів та місця їх входу в систему.
W1 – управляюча частина (регулятор);
W2 – об'єкт управління.
Розглянемо слідкуючу систему

Слайд 6Точність виконання цільової функції визначається помилкою управління:
Різниця між реакціями ідеальної
та реальної систем на один і той же сигнал.
Передаточна функція помилки – відношення зображень по Лапласу помилки к зображенню по Лапласу відповідного вхідного впливу.

Слайд 7
Передаточна функція помилки що виникає під впливом вхідного сигналу z(t)
Передаточна функція
помилки що виникає під впливом сигналу перешкоди ζ(t)
Сумарна помилка ε(t) в зображеннях:
Передаточна функція помилки що виникає під")
Слайд 8Показники якості управління
в динамічному режимі
в статичному режимі
стала помилка
помилка по
швидкості
помилка по прискоренню
помилка по прискоренню
прямі
непрямі
показник коливальності
полоса пропускання
резонанс-на частота
характер ПП
тривалість ПП
перерегулю-вання
час досягнення першого максимуму


Слайд 10стала помилка обумовлена дією на вхід системи управління ступінчастого сигналу;
помилка по
швидкості обумовлена дією на вхід САУ сигналу, що змінюється за лінійним законом;
помилка по прискоренню обумовлена дією на вхід САУ сигналу, що змінюється за квадратичним законом
помилка по прискоренню обумовлена дією на вхід САУ сигналу, що змінюється за квадратичним законом

Слайд 11Теорема про кінцеве значення
Зображення по Лапласу:
- ступінчатого сигналу
- лінійного сигналу
- квадратичного
сигналу


Слайд 13Система управління, що має сталу помилку називається статичною.
Якщо помилка дорівнює нулю
то система називається астатичною
Порядок астатизму визначається порядком сигналу зовнішнього впливу, який САУ може компенсувати без помилки


Слайд 15Прямі показники:
за характером затухання перехідний процес буває:
монотонний;
аперіодичний;
коливальний.

Слайд 16Прямі показники:
тривалість перехідного процесу tпп
інтервал часу від моменту подачі на
вхід системи 1(t) до моменту часу, після якого виконується нерівність:
 до")
Слайд 17Алгоритм визначення тривалості перехідного процесу
за графіком ОПФ знайти стале значення вихідного
сигналу hСТ ;
обчислити Δ;
на графіку ОПФ в масштабі провести горизонтальні прямі, що відповідають hСТ + Δ та hСТ – Δ;
знайти точку на графіку ОПФ, після якої значення h(t) не виходить за межі горизонтальних прямих hСТ + Δ та hСТ – Δ;
з цієї точки опустити на вісь часу перпендикуляр;
записати значення tпп
обчислити Δ;
на графіку ОПФ в масштабі провести горизонтальні прямі, що відповідають hСТ + Δ та hСТ – Δ;
знайти точку на графіку ОПФ, після якої значення h(t) не виходить за межі горизонтальних прямих hСТ + Δ та hСТ – Δ;
з цієї точки опустити на вісь часу перпендикуляр;
записати значення tпп

:")
Слайд 19
показник коливальності:
Непрямі показники визначаються по АЧХ замкнутої системи:
резонансна частота
полоса пропускання

Слайд 20В ТАУ можно выделить две характерные задачи:
1) в заданной САУ
найти и оценить переходные процессы - это задача анализа САУ;
2) по заданным переходным процессам и основным показателям разработать САУ - это задача синтеза САУ
2) по заданным переходным процессам и основным показателям разработать САУ - это задача синтеза САУ
 в заданной САУ найти и оценить переходные")

Слайд 22Закон регулювання – це конкретне правило формування управляючого сигналу, яке дозволяє
визначити його поточне значення для заданих умов.
Закон регулювання встановлює математичний зв'язок регулюючого фактору m з сигналом ε в процесі регулювання

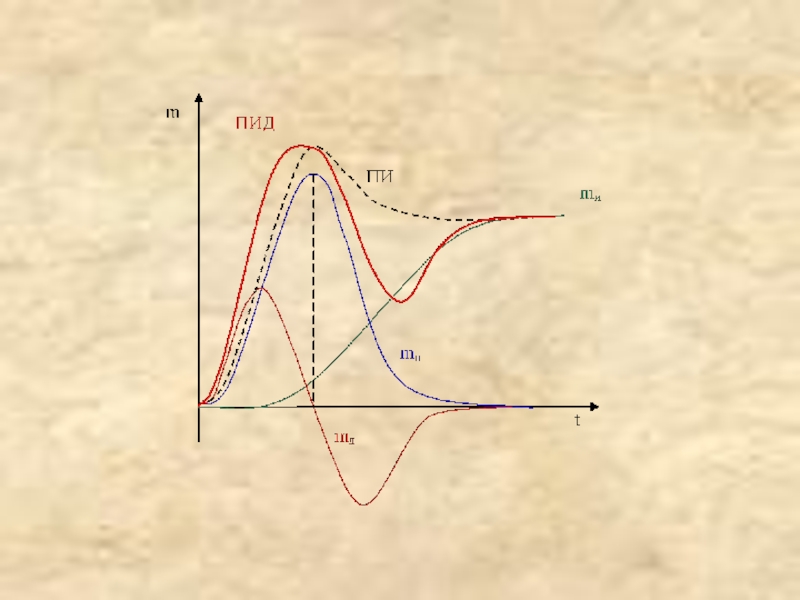
Слайд 23Закони регулювання
П-закон (пропорційний закон регулювання)
И-закон (інтегруючий закон регулювання)
ПИД-закон (ускладненний закон регулювання)
И-закон (інтегруючий закон регулювання)ПИД-закон (ускладненний закон регулювання)")