- Главная
- Разное
- Дизайн
- Бизнес и предпринимательство
- Аналитика
- Образование
- Развлечения
- Красота и здоровье
- Финансы
- Государство
- Путешествия
- Спорт
- Недвижимость
- Армия
- Графика
- Культурология
- Еда и кулинария
- Лингвистика
- Английский язык
- Астрономия
- Алгебра
- Биология
- География
- Детские презентации
- Информатика
- История
- Литература
- Маркетинг
- Математика
- Медицина
- Менеджмент
- Музыка
- МХК
- Немецкий язык
- ОБЖ
- Обществознание
- Окружающий мир
- Педагогика
- Русский язык
- Технология
- Физика
- Философия
- Химия
- Шаблоны, картинки для презентаций
- Экология
- Экономика
- Юриспруденция
Специальные функции PLC. PID - регулятор презентация
Содержание
- 1. Специальные функции PLC. PID - регулятор
- 3. Регулятор в системе управления
- 5. Расчёт управляющего воздействия (1)
- 6. Расчёт управляющего воздействия (2) (продолжение) ап
- 8. Пропорциональная составляющая регулятора
- 9. Интегральная составляющая регулятора
- 10. Дифференциальная составляющая регулятора
- 11. PID - регулирование
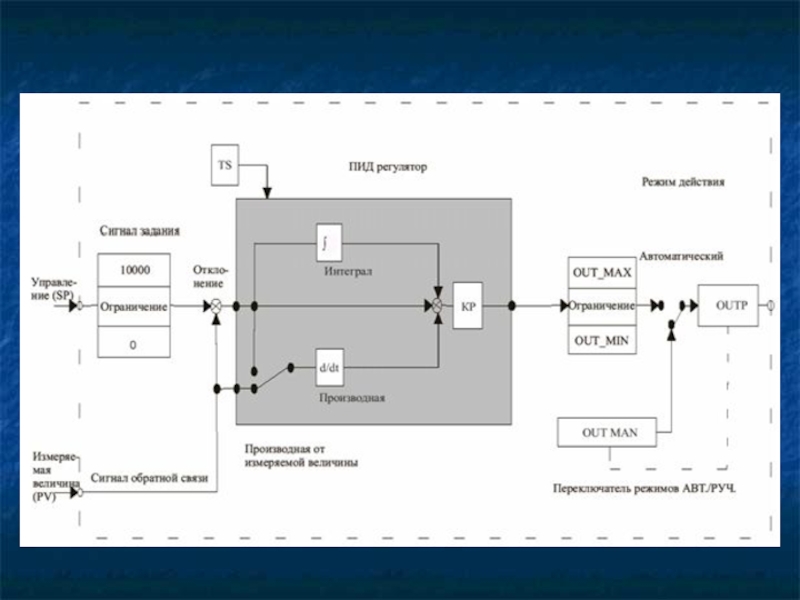
- 12. Встроенный PID-регулятор
- 13. Настройки регулятора
- 14. Настройки регулятора
- 15. Режимы управления
- 16. Прямая и обратная работа регулятора:
- 17. Вызов функции PID-регулятора Синтаксис вызова функции:
- 18. PV_DEV/DEVAL_MMI (бит и
- 19. Примеры вызова функции PID 1. Программирование на
- 20. Программная реализация PID-регулятора
- 21. Расчёт управляющего воздействия для PID-регулятора •
- 22. Настройка параметров PID Существуют различные способы настройки
- 23. Настройка замкнутого контура Правило требует использования
- 24. В зависимости от типа используемого устройства управления
- 25. Настройка разомкнутого контура
- 26. Переключите регулятор в ручной режим, задайте приращение
- 27. В результате такого типа настройки также получается
- 28. Влияние параметров PID на процесс
- 29. Влияние пропорционального воздействия на реакцию процесса при ступенчатом управлении
- 30. Влияние интегрального воздействия на реакцию процесса при ступенчатом управлении
- 31. Влияние воздействия по производной на реакцию процесса при ступенчатом управлении
- 32. Ограничения PID регулятора Если процесс представляется моделью
- 33. PID управление дает хорошие результаты при выполнении
- 34. Конец


")
 (продолжение)ап")











Слайд 19Примеры вызова функции PID
1. Программирование на языке Ladder
С PID(‘TEMP’, ‘DEGREES’,
2. Программирование на языке Structured Text
! (*PID коррекция контура регулирования температуры*)
PID(‘TEMP’,‘DEGREES’, %IW3.1,%QW4.0, LOOP1_MA, LOOP1:43);
")

Слайд 21Расчёт управляющего воздействия для PID-регулятора
• Алгоритм без интегральной составляющей (TI =
для et = SP - PV,
выход OUT = KP [et +Dt] /100 + 5000
где Dt = операция дифференцирования.
Алгоритм с учетом интегральной части (TI ≠ 0) выполняет следующие действия:
для et = SP - PV,
выход ΔOUT = KP [Δe t + (TS/10TI) et + ΔDt]/100
OUT = OUT + ΔOUT
где Dt = операция дифференцирования.
• При холодном перезапуске, PID перезапускается в ручном режиме с нулевыми начальными условиями. Для того чтобы, после холодного старта, в автоматическом или ручном режиме установить не нулевые начальные условия, после вызова PID должна быть запрограммирована его инициализация.
 выполняет следующие действия:для")
Слайд 22Настройка параметров PID
Существуют различные способы настройки параметров PID регулятора. Здесь описан

Слайд 23Настройка замкнутого контура
Правило требует использования пропорционального управления (TI = 0, TD
После чего, просто увеличьте значение критического коэффициента усиления (Kpc), что вызовет незатухающие колебания с периодом колебаний (Tc), для того чтобы выбрать требуемые значения для оптимальной настройки системы управления.
 при оценке")
Слайд 24В зависимости от типа используемого устройства управления процессом (PID или PI),
Значение
процесса
Значение
процесса
Значение
процесса
, настраиваемым коэффициентам присваиваются следующие")

Слайд 26Переключите регулятор в ручной режим, задайте приращение на выход и анализируйте
Пересечение линии, представляющей интегральную составляющую, и оси времени определяет значение времени Tu.
Величина Tg определяется как время, необходимое для изменения управляемой переменной (величина процесса) до такой амплитуды, которая приложена к выходу регулятора.
В зависимости от типа используемого регулятора (PID или PI), настраиваемым коэффициентам присваиваются следующие значения:

Слайд 27В результате такого типа настройки также получается высоко динамичное устройство управление,





Слайд 32Ограничения PID регулятора
Если процесс представляется моделью с передаточной функцией со звеном
где:•τ = постоянная запаздывания модели,
• θ= постоянная времени модели,
Уровень производительности PID является функцией от отношения τ/ θ.

Слайд 33PID управление дает хорошие результаты при выполнении следующих условий:
Для τ/ θ.
Для τ/ θ > 20, достаточно релейного управления с петлей гистерезиса.