Раздел №2
- Главная
- Разное
- Дизайн
- Бизнес и предпринимательство
- Аналитика
- Образование
- Развлечения
- Красота и здоровье
- Финансы
- Государство
- Путешествия
- Спорт
- Недвижимость
- Армия
- Графика
- Культурология
- Еда и кулинария
- Лингвистика
- Английский язык
- Астрономия
- Алгебра
- Биология
- География
- Детские презентации
- Информатика
- История
- Литература
- Маркетинг
- Математика
- Медицина
- Менеджмент
- Музыка
- МХК
- Немецкий язык
- ОБЖ
- Обществознание
- Окружающий мир
- Педагогика
- Русский язык
- Технология
- Физика
- Философия
- Химия
- Шаблоны, картинки для презентаций
- Экология
- Экономика
- Юриспруденция
Электронная автоматика авиационного оборудования. Теория автоматического управления полетом ВС презентация
Содержание
- 1. Электронная автоматика авиационного оборудования. Теория автоматического управления полетом ВС
- 2. Тема №16: Системы автоматизированного и автоматического
- 3. 1. Воздушное судно как объект управления.
- 4. Вопрос № 1. Воздушное судно
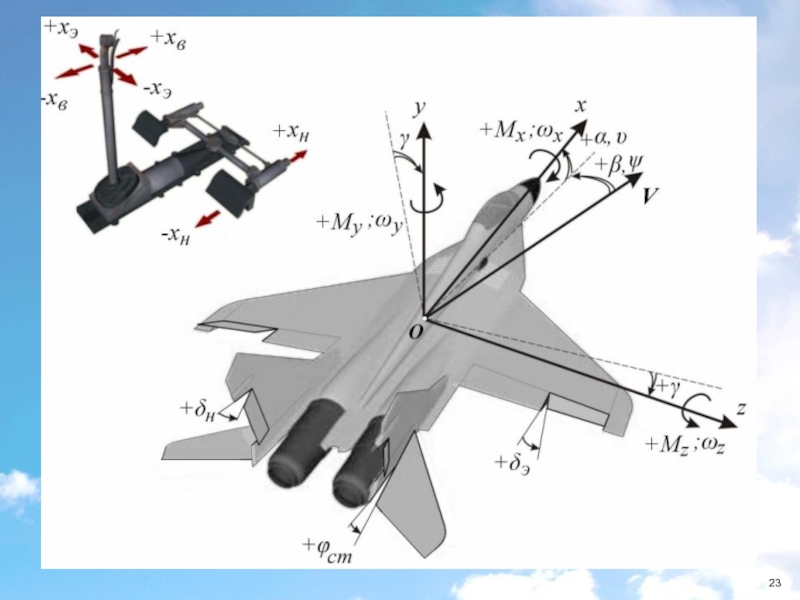
- 5. V – воздушная скорость; Н
- 6. ∠ ψ - угол курса; ∠ γ
- 7. Управляемость ЛА Это способность Л.А. изменять
- 8. Поперечная устойчивость (по крену)
- 9. Поперечная устойчивость
- 10. Путевая устойчивость Характеризуется стремлением самолета устранять возникшее скольжение.
- 11. Вопрос № 2. Общая характеристика
- 12. 1. Обеспечение требуемой управляемости на всех
- 13. Классификация систем управления: По характеру воздействия на
- 14. Классификация систем управления: По источнику энергии, затрачиваемой
- 15. Классификация систем управления: По степени участия летчика
- 16. Блок-схема системы управления
- 17. Вопрос №3. Назначение и общая характеристика основных устройств систем управления.
- 18. Командные рычаги Ручка управления самолетом: 1, 2
- 19. Требования, предъявляемые к командным рычагам 2.
- 20. 3. Отсутствие резонансных колебаний. Проводка управления Предъявляемые
- 21. 1. Жесткая (тяги, качалки и детали их
- 22. 1. Реактивные органы управления; Органы управления
- 24. Шарнирный момент Mшар = Pруля х
- 25. Триммер Для уменьшения М шар. при длительном отклонении командных рычагов применяют триммеры.
- 26. Предъявляемые требования: - Достаточная мощность,
- 27. Виды силовых приводов в зависимости от
- 28. Принцип работы гидроусилителя
- 29. - Необратимая схема включения(весь М шар. воспринимается
- 30. Включение гидроусилителей по обратимой схеме
- 31. Включение загрузочного механизма по необратимой схеме
- 32. Агрегаты загрузки командных рычагов - Предварительная
- 33. Механизмы триммерного эффекта Включение механизма триммерного эффекта
- 34. Агрегаты регулирования загрузки командных рычагов Включение автомата
- 35. Устройства изменения передаточных отношений Система непрямого управления
- 36. Агрегаты, предупреждающие об опасных режимах полета Обеспечивают
- 37. Система непрямого управления с демпфером колебаний самолета
- 38. Устройства улучшения продольной устойчивости Векторная диаграммам распределения
- 39. Распределение давления при докритических (1) и закритических
- 40. Вопрос № 4: Общие сведения о системе управления самолета МиГ-29
- 41. 1. Система продольного управления (органы продольного управления:
- 42. Система автоматического управления (САУ): Режимы
- 43. Литература: Осовский В. П. «Комплексы
Слайд 1Эксплуатация и ремонт авиационного
оборудования самолетов и вертолетов
Электронная автоматика авиационного оборудования, приборное,
кислородное и высотное оборудование

Слайд 2Тема №16:
Системы автоматизированного и автоматического управления
Занятие №1:
Основные понятия теории автоматического
управления полетом ВС

Слайд 31. Воздушное судно как объект управления.
2. Общая характеристика
систем управления.
3. Назначение и общая характеристика основных устройств систем управления.
4. Общие сведения о системе управления самолета
МиГ-29
3. Назначение и общая характеристика основных устройств систем управления.
4. Общие сведения о системе управления самолета
МиГ-29
Вопросы занятия:

Слайд 4Вопрос № 1.
Воздушное судно как
объект управления.
Управление ЛА – это процесс изменения сил и моментов, действующих на самолет в целях обеспечения его движения по заданной траектории.

Слайд 5 V – воздушная скорость;
Н – высота;
∠ ϑ – угол
тангажа;
∠ α – угол атаки.
∠ α – угол атаки.
Параметры продольного движения:
Продольное движение
– это движение в вертикальной плоскости.

Слайд 6 ∠ ψ - угол курса;
∠ γ - угол крена;
∠ β -
угол скольжения;
∠ θ - угол наклона траектории.
∠ θ - угол наклона траектории.
Параметры бокового движения
Боковое движение
– это движение в плоскости крыла, в простейшем случае это движение в горизонтальной плоскости.

Слайд 7Управляемость ЛА
Это способность Л.А. изменять свое положение в пространстве под действием
управляющих сил и моментов.
Устойчивость ЛА
Это способность самолета без участия летчика сохранять заданный режим полёта и возвращаться к исходным параметрам полёта после прекращения действия возмущения.

Слайд 8
Поперечная устойчивость (по крену)
Это способность самолета самостоятельно возвращаться к исходному
значению угла крена при случайном его изменении после прекращения действия возмущения.
 Это способность самолета самостоятельно возвращаться к исходному значению угла крена при")


Слайд 11Вопрос № 2.
Общая характеристика систем управления.
Системы управления
обеспечивают изменение пространственного положения ЛА.

Слайд 12
1. Обеспечение требуемой управляемости на всех режимах полета.
Требования предъявляемые к системам
управления:
2. Плавность управления, малая инерционность, возможность парирование летчиком отказов отдельных систем управления.
3. Своевременное предупреждение летчика о попадании ВС в недопустимый режим полета.

Слайд 13Классификация систем управления:
По характеру воздействия на ВС
Основные
(продольное управление, поперечное управление,
путевое управление, у вертолета управление величиной и направлением вектора тяги несущего винта и путевое управление).
2. Дополнительные системы управления
( управление положением стоек шасси, управление режимами работы двигателя);
2. Дополнительные системы управления
( управление положением стоек шасси, управление режимами работы двигателя);

Слайд 14Классификация систем управления:
По источнику энергии, затрачиваемой на отклонение органов управления
Ручное управление
(за счет мускульной силы летчика);
2. Бустерное управление
(использование энергии посторонних источников).

Слайд 15Классификация систем управления:
По степени участия летчика в процессе управления ВС
Неавтоматическое управление
(все задачи по управлению выполняет летчик);
2. Директорное управление
(управление осуществляет летчик совместно с САУ);
3. Автоматическое управление.



Слайд 18Командные рычаги
Ручка управления
самолетом:
1, 2 - тяги отклонения половин руля
Штурвальная колонка:
1 -
шарнир;
2 - тяга управления
рулем высоты,
3 - трос управления элеронами
2 - тяга управления
рулем высоты,
3 - трос управления элеронами
Ножные педали подвесного типа:
1 - педали;
2 - тяга руля управления
Это устройства, посредством которых летчик вводит в систему управления управляющие сигналы и осуществляет их дозировку.

Слайд 19Требования, предъявляемые
к командным рычагам
2. Должны допускать регулировку по росту летчика;
3.
Независимость перемещений;
4. Перемещения должны соответствовать естественным рефлексам человека.
Усилия не должны превышать предельных значений:
РВ max = 15-20 кгс. (на ручке управления самолетом в направлении
на себя, от себя);
РЭ max = 8-10 кгс. (на ручке управления самолетом в направлении
влево - вправо);
РН max = 20-30 кгс. (на педалях);

Слайд 203. Отсутствие резонансных колебаний.
Проводка управления
Предъявляемые требования:
1. При деформации планера не должно
быть заклинивания или обрыва проводки управления;
2. Минимальные трение и люфты;
Предназначена для передачи управляющих сигналов к органам управления (или к гидроусилителям – силовым приводам).

Слайд 211. Жесткая (тяги, качалки и детали их крепления),
3. Смешанная.
2. Гибкая (тросы,
направляющие ролики, устройства регулирования
натяжения тросов и детали их крепления),
натяжения тросов и детали их крепления),
Классификация проводки управления :
Недостатки гибкой проводки:
- вытягивание тросов и разрыв нитей тросов в местах
перегибов;
- необходимость прокладывания двух тросов .
,3. Смешанная.2. Гибкая (тросы, направляющие ролики, устройства регулирования")
Слайд 22
1. Реактивные органы управления;
Органы управления
Виды:
органы путевого управления
(руль направления или цельноповоротный
киль).
- органы поперечного управления
(элероны; дифференциально отклоненяемые половинки стабилизатора (в режиме ножницы), интерцепторы);
- органы продольного управления
(синхронно отклоняемые половинки стабилизатора или рули высоты);
2. Аэродинамические органы управления:
.- органы поперечного управления")
Слайд 24Шарнирный момент
Mшар = Pруля х a, где a – плечо.
Это момент,
возникающий на аэродинамическом органе управления и передаваемый на командный рычаг при ручном управлении.

Слайд 25Триммер
Для уменьшения М шар. при длительном отклонении командных рычагов применяют триммеры.

Слайд 26Предъявляемые требования:
- Достаточная мощность,
- Плавность и точность работы.
Силовые приводы
Обеспечивают усилия
и перемещения необходимые для отклонения аэродинамических органов управления.

Слайд 27Виды силовых приводов
в зависимости от используемой энергии:
- Гидравлические,
- Пневматические,
- Электрические.
Достоинства
гидравлических приводов:
- малая инерционность;
- возможность фиксации в промежуточных положениях.
- малая инерционность;
- возможность фиксации в промежуточных положениях.


Слайд 29- Необратимая схема включения(весь М шар. воспринимается силовым приводом).
Виды схем
включения
силовых приводов
силовых приводов
- Обратимая схема включения( часть М шар.
воспринимается силовым приводом, а часть летчиком);
. Виды схем включения силовых приводов- Обратимая")

Слайд 31
Включение загрузочного механизма по необратимой схеме
При необратимой схеме включения силовых приводов
для восстановления физиологического восприятия процессов управления применяют дополнительную загрузку командных рычагов (пружинные и гидравлические загрузочные устройства).

Слайд 32Агрегаты загрузки командных рычагов
- Предварительная затяжка исключает случайные отклонения командных
рычагов.
- Жесткая пружина улучшает дозировку усилий при малых перемещениях командных рычагов.
- Мягкая пружина не допускает повышенных нагрузок на командных рычаги при больших их отклонениях
- Жесткая пружина улучшает дозировку усилий при малых перемещениях командных рычагов.
- Мягкая пружина не допускает повышенных нагрузок на командных рычаги при больших их отклонениях
Конструктивные особенности:
Двухпружинный загрузочный механизм
Загрузочные механизмы
применяются на ЛА с необратимой схемой включения силовых приводов и предназначены для имитации усилий на командных рычагах. Наибольшее распространение получили двухпружинные загрузочные устройства.

Слайд 33Механизмы триммерного эффекта
Включение механизма триммерного эффекта
а – система непрямого управления с
механизмом триммерного эффекта
б – принцип действия механизма триммерного эффекта
б – принцип действия механизма триммерного эффекта
Предназначены для снятия нагрузок с командных рычагов при длительном их отклонении.
Конструктивно представляют электромеханическую раздвижную тягу.

Слайд 34Агрегаты регулирования загрузки командных рычагов
Включение автомата регулирования загрузки:
1 - командный блок;
2 - автомат регулирования загрузки;
3 - загрузочный механизм.
Предназначены для изменения нагрузки командных рычагов в зависимости от высоты и скорости полета. Конструктивно представляют из себя электромеханическую раздвижную тягу изменяющую передаточные отношения в проводке управления между командным рычагом и загрузочным устройством.

Слайд 35Устройства изменения передаточных отношений
Система непрямого управления с автоматом, регулирующим передаточное отношение
1 - командный блок АРП,
2 - автомат, регулирующий передаточное отношение.
Обеспечивают изменения углов, отклонения аэродинамических органов в зависимости от высоты и скорости полета.

Слайд 36Агрегаты, предупреждающие об опасных режимах полета
Обеспечивают сигнализацию и дополнительное нагружение командных
рычагов или постановку их на упор при приближении к опасному режиму полета. При этом направление нагрузки направлено в сторону вывода самолета из опасного режима.

Слайд 37Система непрямого управления с демпфером колебаний самолета
Устройства улучшения динамических характеристик самолета
Демпферы
- снижают амплитуду и длительность колебаний Л.А. на переходных режимах путем дополнительного отклонения аэродинамических органов управления.

Слайд 38Устройства улучшения продольной устойчивости
Векторная диаграммам распределения давления по профилю
Зависимость положения фокуса
крыла самолета от числа М полета
При переходе к сверхзвуковым скоростям полета за счет перераспределения давлений по несущим поверхностям фокус самолета значительно смещается назад. В результате возникает M пик.

Слайд 39Распределение давления при докритических (1) и закритических (2) скоростях полёта
Продольная устойчивость
самолёта по скорости
Возможные варианты для устранения M пик. и улучшения устойчивости:
1. Дополнительное отклонение аэродинамических органов управления, для компенсации М пик. (МиГ – 29).
2. Перемещение центра давления (изменение стреловидности крыла, МиГ-23, Су-24).
3. Перемещение центра тяжести (Конкорд – перекачка топлива).
 и закритических (2) скоростях полётаПродольная устойчивость самолёта по скоростиВозможные варианты")

Слайд 411. Система продольного управления (органы продольного управления: синхронно отклоняемые половинки стабилизатора);
2.
Система поперечного управления (органы поперечного управления:
элероны, дифференциально отклоняемые половинки стабилизатора (в режиме ножницы));
3. Система путевого управления (органы путевого управления: руль направления);
4. Дополнительные системы улучшения устойчивости управляемости и
безопасности полета:
- Система автоматического регулирования управления АРУ-29-2;
- Система ограничительных сигналов СОС-3М;
- Система автоматического управления САУ-451-03.
элероны, дифференциально отклоняемые половинки стабилизатора (в режиме ножницы));
3. Система путевого управления (органы путевого управления: руль направления);
4. Дополнительные системы улучшения устойчивости управляемости и
безопасности полета:
- Система автоматического регулирования управления АРУ-29-2;
- Система ограничительных сигналов СОС-3М;
- Система автоматического управления САУ-451-03.
Состав системы управления самолета МиГ-29
;2. Система поперечного управления (органы")
Слайд 42Система автоматического управления (САУ):
Режимы работы:
- режим согласования
- режим демпфирования
- режим стабилизации
-
режим приведения к горизонту
- режим траекторного управления
- режим траекторного управления
:Режимы работы:- режим согласования- режим демпфирования- режим стабилизации- режим приведения к горизонту-")
Слайд 43Литература:
Осовский В. П. «Комплексы авиационного оборудования», ВВИА им. Проф. Н.
Е. Жуковского, М., 2004 г., с 191…194;
2. Шабалов П. Г. «Системы автоматичского управления», ВК СГАУ, инв. № 16.3, 2005 г., с. 5…16, 68…101;
2. Шабалов П. Г. «Системы автоматичского управления», ВК СГАУ, инв. № 16.3, 2005 г., с. 5…16, 68…101;
Задание на самоподготовку:
Изучить основные понятия теории автоматического управления полетом ВС, состав системы управления самолета Миг-29.