ЛИТЕРАТУРА
[1] стр. 361-371
ВВЕДЕНИЕ
Задача предпосадочного маневрирования самолета (захода на посадку) состоит в том, чтобы вывести ЛА в точку воздушного пространства относительно аэродрома посадки с таким расчетом, чтобы самолет находился на продолжении ВПП на определенной высоте и скорости. В этой области происходит «принятие решения» о посадке или об уходе на второй круг.
Завершающий этап полета самолета является наиболее ответственным участком движения самолета и условно разделяется на предпосадочный маневр (заход на посадку) и саму посадку

, автоматическом , директорном, совмещенным")
Пилот по наземным ориентирам")




 - параметр, характеризующий предельную высоту для посадки. Это - установленная относительная")
, каждая из которых характеризуется высотой принятия")





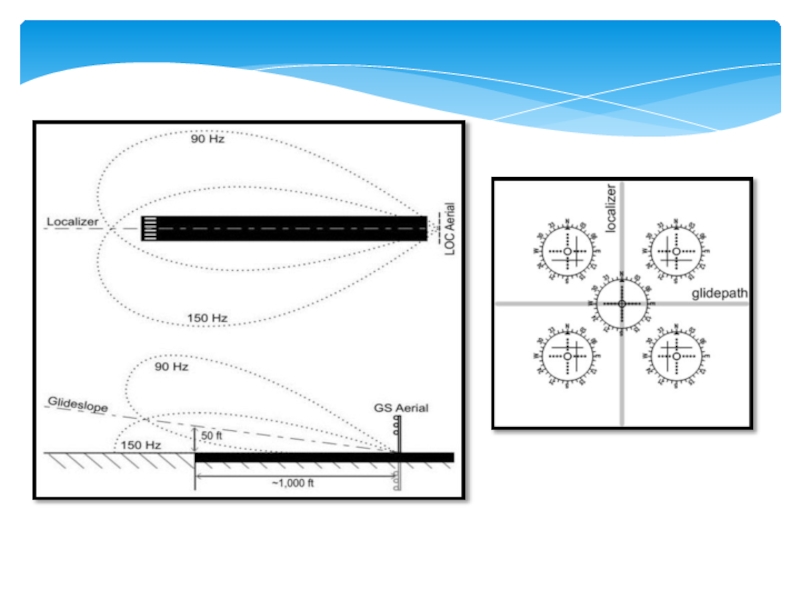
 курсо-глиссадные системы – обеспечивают формирование траектории посадки (рис. 1), как пересечение двух плоскостей, построенных")
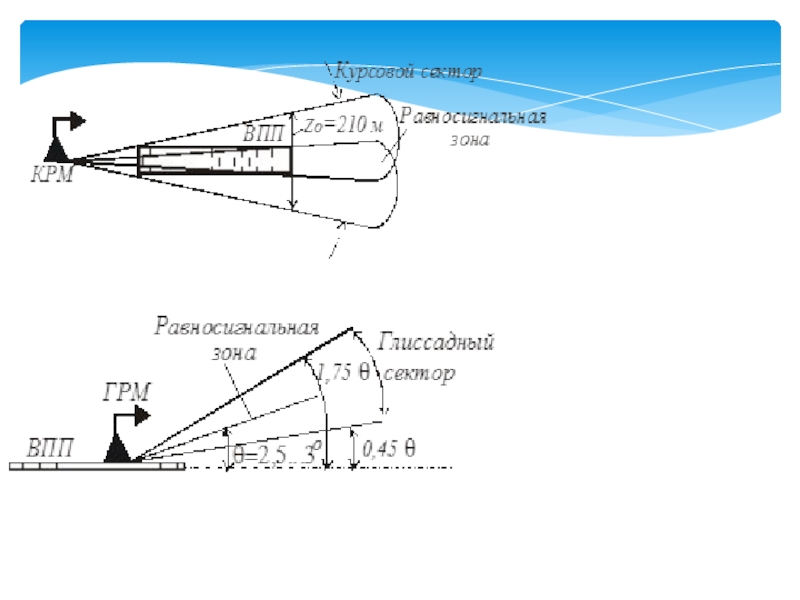
КРМДПРСБПРСГРМГРММРММРМКРМ")
 (система")
")



 в горизонтальной плоскости; б) в вертикальной плоскости; 1 –")
 — система распространения поправок к данным, передаваемым навигационной системой GPS. Разработана американской организацией FAA")













 включается автоматически при появлении устойчивого сигнала от наземного РМ. Заданный курс")

Закон управления командной стрелкойотклонение")