положение ОА1, точка В шатуна находится в В1. Если в данный момент кривошип находится в положении ОА, образуя угол α с линией мертвых точек, соответственно чему шатун занимает положение АВ, образуя с той же прямой угол β, то, следовательно, палец В ползуна за время поворота кривошипа на угол α переместился на величину х=В1В. Выразим перемещение х в зависимости от данных величин.
Опустим перпендикуляр АК на ОВ1; тогда :ОВ=ОК+КВ. Из треугольников АОК и АВК имеем: ОК=ОА cosα=rcosα и KB=ABcosβ=lcosβ;следовательно, ОВ=rcosα+lcosβ и x=r+l- rcosα- lcosβ =r(1-cosα)+l(1-cosβ).
Выразим cosβ в зависимости от угла α из треугольников АОК и АВК; найдем
АК=rsinα и AK=lsinβ. Отсюда: rsinα= lsinβ и sinβ=
].
Кривошипно-шатунный механизм служит для
преобразования равномерного вращательного движения конца кривошипа в неравномерное прямолинейное движение ползуна, и обратно. Аналогично работает двигатель автомобиля.








 вычислил небольшую таблицу котангенсов через 1°")
 , составил аналогичную «таблицу тангенсов».")








. .")







;")
). k=2 α=0 m=1; -2 ;0,5")

 (рис.1)II.r=1/2+sin3ϕ (рис.2), III. r=1+ sin3ϕ (рис.3), IV.")
")
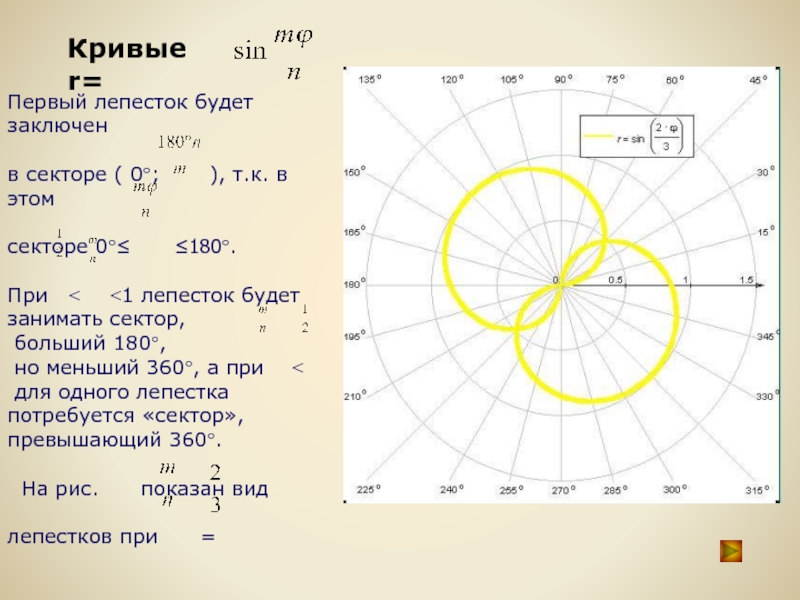
,при а=1/2 (рис.2), при а=1 (рис.3) лепестки имеют законченный")

 превращает незамкнутую кривую в кривую замкнутую.")

(y+sinx)")