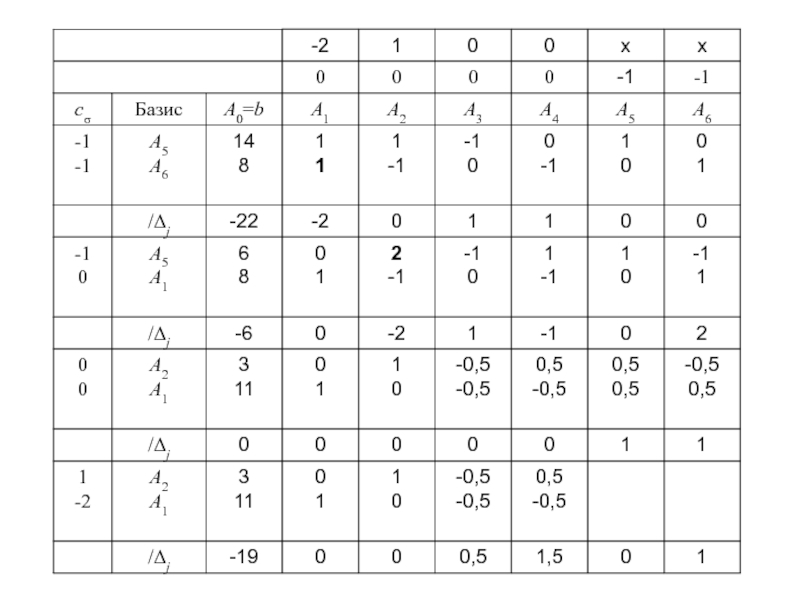
ЗЛП задана в канонической форме, (
Этого всегда можно добиться, умножив уравнения на -1):
(1)
Этого всегда можно добиться, умножив уравнения на -1):
(1)
. ЗЛП")
: (2)Вектор составлен из естественных переменных ЗЛП (1.) и искусственных переменных,")

. Пусть оптимальный")


(1)
σ - носитель плана, следовательно - ,
или в матричной форме записи:
(2)
 - БДП")
 хσ0 представляет часть исходного вектора х0 , из которого")



Если не удалось найти и скачать презентацию, Вы можете заказать его на нашем сайте. Мы постараемся найти нужный Вам материал и отправим по электронной почте. Не стесняйтесь обращаться к нам, если у вас возникли вопросы или пожелания:
Email: Нажмите что бы посмотреть
Это сайт презентаций, докладов, проектов, шаблонов в формате PowerPoint. Мы помогаем школьникам, студентам, учителям, преподавателям хранить и обмениваться учебными материалами с другими пользователями.