Синергетика
Теория алгоритмов
Распознавание образов
Теория оптимального управления
Теория обучающихся систем
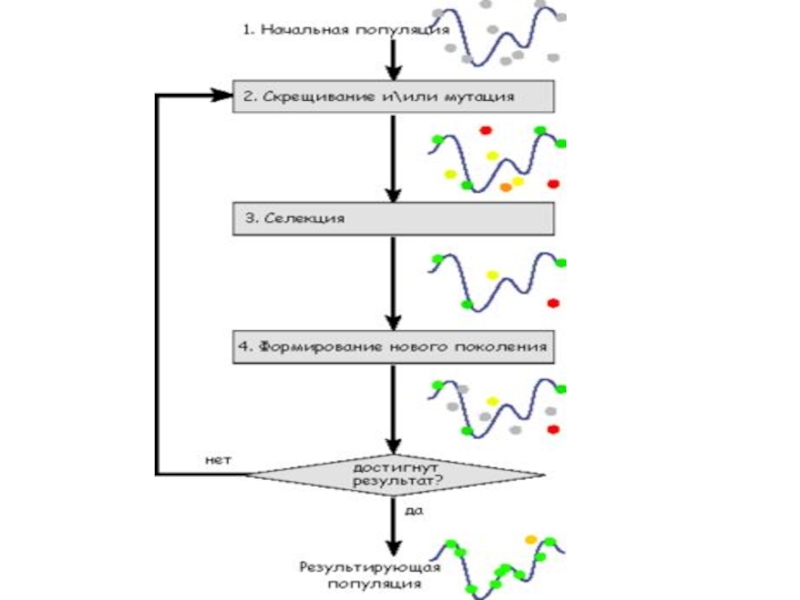
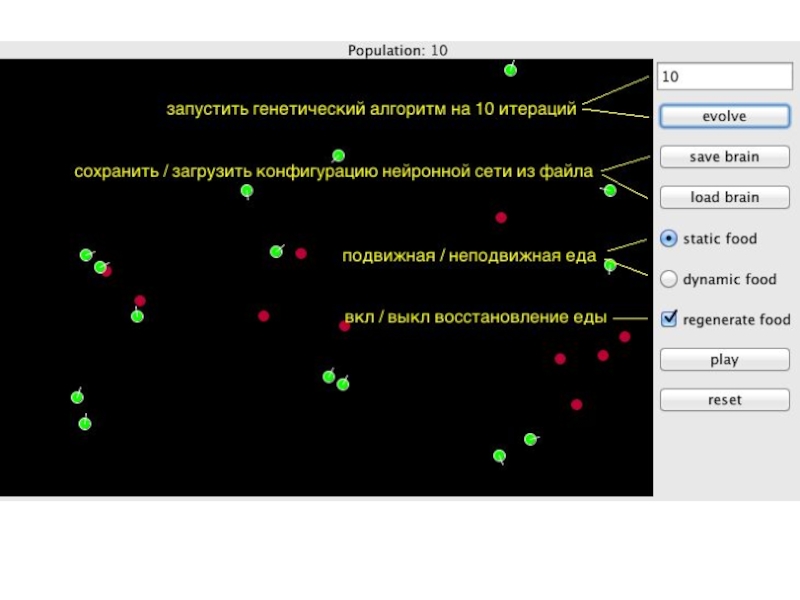
Искусственный интеллект
Кибернетика второго порядка
Компьютерное зрение
Системы управления
Эмерджентность
Обучающиеся организации
Новая кибернетика
Теория общения
Биоинженерия
Биологическая кибернетика
Биоинформатика
Бионика
Медицинская кибернетика
Нейрокибернетика
Гомеостаз
Синтетическая биология
Системная биология

 x1 x2 xn Нейрон Функция активации w")
f(hn)f(h3)n(h1)n(h2)n(hn)Трехслойная нейронная сетьn(h1)n(h2)n(hn)f(h1)f(hn)f(h3)Однослойный персептронСеть ХопфилдаЧисло связей в многослойном персептронеЧисло связей в полно-связной нейронной")


n(h2)n(hn)")
, Chattanooga, TN по заказу NASA и Air")