МО "Государственный
социально-гуманитарный университет"
Аллёнов Сергей Владимирович
студенты отделения «Информатика»:
Лебедева Александра Дмитриевна
Сотников Игорь Михайлович
Дудкина Юлия Дмитриевна
- Главная
- Разное
- Дизайн
- Бизнес и предпринимательство
- Аналитика
- Образование
- Развлечения
- Красота и здоровье
- Финансы
- Государство
- Путешествия
- Спорт
- Недвижимость
- Армия
- Графика
- Культурология
- Еда и кулинария
- Лингвистика
- Английский язык
- Астрономия
- Алгебра
- Биология
- География
- Детские презентации
- Информатика
- История
- Литература
- Маркетинг
- Математика
- Медицина
- Менеджмент
- Музыка
- МХК
- Немецкий язык
- ОБЖ
- Обществознание
- Окружающий мир
- Педагогика
- Русский язык
- Технология
- Физика
- Философия
- Химия
- Шаблоны, картинки для презентаций
- Экология
- Экономика
- Юриспруденция
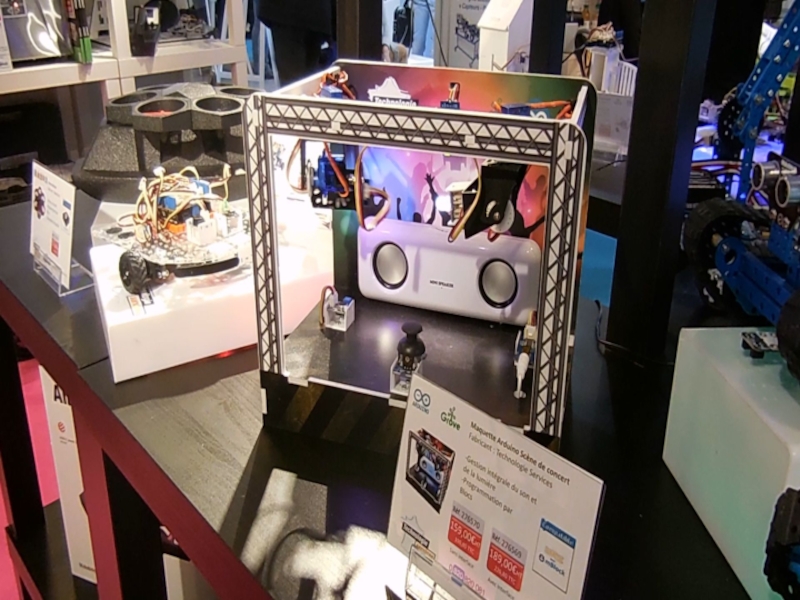
Движение робота презентация
Содержание
- 1. Движение робота
- 3. A) Механизм B) Робот C) Андроид D) Машина вопрос № 1
- 4. A) ЗЕВС B) АПОЛОН C) АРЕС D) ГЕФЕСТ вопрос № 2
- 5. A) Механизм B) Робот C) Андроид D) Машина вопрос № 3
- 6. A) инфракрасный датчик B) датчик касания
- 7. вопрос № 5 A) Механизм B) Робот C) Андроид D) Машина
- 8. A) инфракрасный датчик B) датчик касания
- 9. A) Механизм B) Робот C) Андроид D) Машина вопрос № 7
- 10. Алгоритмом называется общий единообразный, точно определённый способ
- 11. Алгоритм – описание последовательности действий (план), строгое исполнение
- 12. Стадии создания алгоритма: Алгоритм должен
- 13. Исполнитель - объект, который выполняет алгоритм.
- 14. Движение робота
- 15. Придумайте свой язык и на нем напишите серию инструкций следования робота домой.
- 16. Классические подходы к программированию движения:
- 17. Сервопривод — это мотор, положением вала которого мы
- 19. A) Механизм B) C) D) вопрос № 1
- 20. A) B) C) D) ГЕФЕСТ вопрос № 2
- 21. A) B) C) Андроид D) вопрос № 3
- 22. A) инфракрасный датчик B) C) D) вопрос № 4
- 23. вопрос № 5 A) B) C) D) Машина
- 24. A) B) C) D) мотор вопрос № 6
- 25. A) B) Робот C) D) вопрос № 7

 МеханизмB) РоботC) АндроидD) Машинавопрос № 1")
 ЗЕВСB) АПОЛОНC) АРЕСD) ГЕФЕСТвопрос № 2")
 МеханизмB) РоботC) АндроидD) Машинавопрос № 3")
 инфракрасный датчикB) датчик касанияC) датчик касанияD) моторвопрос № 4")
 МеханизмB) РоботC) АндроидD) Машина")
 инфракрасный датчикB) датчик касанияC) датчик касанияD) моторвопрос № 6")
 МеханизмB) РоботC) АндроидD) Машинавопрос № 7")
Слайд 10Алгоритмом называется общий единообразный, точно определённый способ решения любой задачи из
данной массовой проблемы, имеющий перечисленные ниже характерные черты.
Характерные черты алгоритма:
Дискретность.
Детерминированность.
Элементарность шагов.
Массовость.
Результативность.

Слайд 11Алгоритм – описание последовательности действий (план), строгое исполнение которых приводит к решению
поставленной задачи за конечное число шагов.
, строгое исполнение которых приводит к решению поставленной задачи за конечное")
Слайд 12Стадии создания алгоритма:
Алгоритм должен быть представлен в форме, понятной человеку, который
его разрабатывает (определить цель, наметить план действий).
Алгоритм должен быть представлен в форме, понятной тому объекту (в том числе и человеку), который будет выполнять описанные в алгоритме действия (выбрать среду и объект алгоритма, детализировать алгоритм).
Алгоритм должен быть представлен в форме, понятной тому объекту (в том числе и человеку), который будет выполнять описанные в алгоритме действия (выбрать среду и объект алгоритма, детализировать алгоритм).

Слайд 13Исполнитель - объект, который выполняет алгоритм.
Основными характеристиками исполнителя являются: среда, система
команд, элементарные действия, отказы.
Среда (или обстановка) — это "место обитания", множество объектов, которые окружают исполнителя.
Среда (или обстановка) — это "место обитания", множество объектов, которые окружают исполнителя.




Слайд 17Сервопривод — это мотор, положением вала которого мы можем управлять. От обычного
мотора он отличается тем, что ему можно точно в градусах задать положение, в которое встанет вал.
Сервоприводы используются для моделирования различных механических движений роботов.
Сервоприводы используются для моделирования различных механических движений роботов.


 МеханизмB)C)D)вопрос № 1")
B)C)D) ГЕФЕСТвопрос № 2")
B)C) АндроидD)вопрос № 3")
 инфракрасный датчикB)C)D)вопрос № 4")
B)C)D) Машина")
B)C)D) моторвопрос № 6")
B) РоботC)D)вопрос № 7")