- Главная
- Разное
- Дизайн
- Бизнес и предпринимательство
- Аналитика
- Образование
- Развлечения
- Красота и здоровье
- Финансы
- Государство
- Путешествия
- Спорт
- Недвижимость
- Армия
- Графика
- Культурология
- Еда и кулинария
- Лингвистика
- Английский язык
- Астрономия
- Алгебра
- Биология
- География
- Детские презентации
- Информатика
- История
- Литература
- Маркетинг
- Математика
- Медицина
- Менеджмент
- Музыка
- МХК
- Немецкий язык
- ОБЖ
- Обществознание
- Окружающий мир
- Педагогика
- Русский язык
- Технология
- Физика
- Философия
- Химия
- Шаблоны, картинки для презентаций
- Экология
- Экономика
- Юриспруденция
Кривые линии и поверхности презентация
Содержание
- 1. Кривые линии и поверхности
- 2. КРИВЫЕ ЛИНИИ И ПОВЕРХНОСТИ Кривые линии Определение:
- 3. Для построения проекций кривой линии необходимо построить
- 4. Образование поверхности На чертеже поверхности задают
- 5. Классификация поверхностей По типу образующей: линейчатые –
- 6. ПОВЕРХНОСТИ ВРАЩЕНИЯ 1. Поверхность вращения общего вида
- 7. 1. Поверхность вращения общего вида ABCD
- 8. 1. Поверхность вращения общего вида ABCD –
- 9. ABCD – образующая O1O2 -
- 10. Недостающие проекции точек, определяются по признаку принадлежности
- 11. Недостающие проекции точек, определяются по признаку принадлежности
- 12. Недостающие проекции точек, определяются по признаку принадлежности
- 13. Недостающие проекции точек, определяются по признаку принадлежности
- 14. Недостающие проекции точек, определяются по признаку принадлежности
- 15. Поверхности линейчатые развертываемые Цилиндрическая поверхность общего
- 16. Поверхности линейчатые развертываемые Цилиндрическая поверхность общего
- 17. Поверхности линейчатые развертываемые Цилиндрическая поверхность общего
- 18. Поверхности линейчатые развертываемые Цилиндрическая поверхность общего
- 19. 2. Частные виды поверхностей вращения 1). Цилиндр
- 20. 1). Цилиндр вращения (прямой круговой цилиндр)– линейчатая,
- 21. 1). Цилиндр вращения (прямой круговой цилиндр)– линейчатая,
- 22. 1). Цилиндр вращения (прямой круговой цилиндр)– линейчатая,
- 23. Коническая поверхность общего вида - образующая
- 24. SA - образующая
- 25. Коническая поверхность общего вида - образующая
- 26. SA - образующая
- 27. SA - образующая
- 28. 2). Конус вращения – линейчатая, развертываемая, алгебраическая
- 29. 2). Конус вращения – линейчатая, развертываемая, алгебраическая
- 30. 2). Конус вращения – линейчатая, развертываемая, алгебраическая
- 31. 2). Конус вращения – линейчатая, развертываемая, алгебраическая
- 32. 2). Конус вращения – линейчатая, развертываемая, алгебраическая
- 33. 2). Конус вращения – линейчатая, развертываемая, алгебраическая
- 34. 2). Конус вращения – линейчатая, развертываемая, алгебраическая
- 35. 2). Конус вращения – линейчатая, развертываемая, алгебраическая
- 36. 2). Конус вращения – линейчатая, развертываемая, алгебраическая
- 37. 2). Конус вращения – линейчатая, развертываемая, алгебраическая
- 38. 2). Конус вращения – линейчатая, развертываемая, алгебраическая
- 39. 2). Конус вращения – линейчатая, развертываемая, алгебраическая
- 40. 2). Конус вращения – линейчатая, развертываемая, алгебраическая
- 41. 2). Конус вращения – линейчатая, развертываемая, алгебраическая
- 42. 2). Конус вращения – линейчатая, развертываемая, алгебраическая
- 43. 2). Конус вращения – линейчатая, развертываемая, алгебраическая
- 44. 2). Конус вращения – линейчатая, развертываемая, алгебраическая
- 45. 2). Конус вращения – линейчатая, развертываемая, алгебраическая
- 46. 3). Сфера – не линейчатая, не развёртываемая,
- 47. 2. Частные виды поверхностей вращения 3). Сфера
- 48. Очерк сферы на любую ПП – окружность:
- 49. Видимость сферической поверхности на плоскости Н определяет
- 50. a → a', a″ ?
- 51. b'→ b, b″ ? Точка
- 52. b'→ b, b″ ? Точка
- 53. c″ → c ,c' ?
- 54. c″ → c ,c' ?
- 55. m' →m, m″ ? Точка М
- 56. m' →m, m″ ? Точка М
- 57. 4). Тор – не линейчатая, не развёртываемая,
- 58. Торовая поверхность образуется путем вращения окружности радиуса
- 59. Торовая поверхность образуется путем вращения окружности радиуса
- 60. Любая точка образующей окружности (M, N, K)
- 61. Горизонтальная проекция торовой поверхности – две концентрические
- 62. Тор имеет две системы круговых сечений: 1).
- 63. Тор имеет две системы круговых сечений: 1).
- 64. 2). Плоскости, проходящие через ось вращения (Q)
- 65. Положение точки на поверхности тора определяется по
- 66. Торовая поверхность образуется путем вращения окружности радиуса
- 67. Вид торовой поверхности зависит от соотношения величин
- 68. Самопересекающийся
- 69. ПЕРЕСЕЧЕНИЕ ПОВЕРХНОСТЕЙ
- 70. ВЗАИМНОЕ ПЕРЕСЕЧЕЕ КРИВОЛИНЕЙНЫХ ПОВЕРХНОСТЕЙ Общим способом построения
- 71. Общим способом построения линии пересечения криволинейных поверхностей
- 72. Общим способом построения линии пересечения криволинейных поверхностей
- 73. Общим способом построения линии пересечения криволинейных поверхностей
- 74. Общим способом построения линии пересечения криволинейных поверхностей
- 75. Применение плоскостей в качестве вспомогательной секущей поверхности.
- 76. Т.к. общая плоскость симметрии параллельна фронтальной ПП,
- 77. Применение плоскостей в качестве вспомогательной секущей поверхности.
- 78. Промежуточные точки находим по алгоритму: 1).
- 79. Промежуточные точки находим по алгоритму: 1).
- 80. Вводя новые вспомогательные горизонтальные плоскости и повторяя
- 81. Применение плоскостей в качестве вспомогательной секущей поверхности.
- 82. Применение плоскостей в качестве вспомогательной секущей поверхности.
- 83. Применение плоскостей в качестве вспомогательной секущей поверхности.
- 84. Применение плоскостей в качестве вспомогательной секущей поверхности.
- 85. Применение плоскостей в качестве вспомогательной секущей поверхности. Вид V Общ. плоскость симметрии
- 86. Общая пл-ть симметрии
- 87. ВЗАИМНОЕ ПЕРЕСЕЧЕЕ КРИВОЛИНЕЙНЫХ ПОВЕРХНОСТЕЙ Применение сфер
- 88. Необходимые условия: 1 Пересекающиеся поверхности должны иметь
- 89. Необходимые условия: 1 Пересекающиеся поверхности должны иметь
- 90. Необходимые условия: 1 Пересекающиеся поверхности должны иметь
- 91. Необходимые условия: 1 Пересекающиеся поверхности должны иметь
- 92. Необходимые условия: 1 Пересекающиеся поверхности должны иметь
- 93. Необходимые условия: 1 Пересекающиеся поверхности должны иметь
- 94. Необходимые условия: 1 Пересекающиеся поверхности должны иметь
- 95. Необходимые условия: 1 Пересекающиеся поверхности должны иметь
- 96. Необходимые условия: 1 Пересекающиеся поверхности должны иметь
- 97. Применение сфер с постоянным центром (Концентрических сфер)
- 98. Очерковые образующие конуса и цилиндра пересекаются, т.к.
- 99. Применение сфер с постоянным центром (Концентрических сфер)
- 100. Применение сфер с постоянным центром (Концентрических сфер)
- 101. Применение сфер с постоянным центром (Концентрических сфер)
- 102. Применение сфер с постоянным центром (Концентрических сфер)
- 103. Применение сфер с постоянным центром (Концентрических сфер)
- 104. Применение сфер с постоянным центром (Концентрических сфер)
- 105. Применение сфер с постоянным центром (Концентрических сфер)
- 106. O1 O2 Применение сфер с постоянным центром (Концентрических сфер)
- 107. Пересечение прямой с кривой поверхностью ПРИМЕР:
- 108. Алгоритм: 1). АВ ⊂ Р(Р⊥ H) 2).
- 109. Алгоритм: 1). АВ ⊂ Р(Р⊥ H) 2).
- 110. Алгоритм: 1). АВ ⊂ Р(Р⊥ H) 2).
- 111. Алгоритм: 1). АВ ⊂ Р(Р⊥ H) 2).
- 112. Алгоритм: 1). АВ ⊂ Р(Р⊥ H) 2).
- 113. Алгоритм: 1). АВ ⊂ Р(Р⊥ H) 2).
- 114. МНОГОГРАННИКИ
- 115. МНОГОГРАННИКИ Определение: Многогранником называется тело, поверхность которого
- 116. Пирамида – многогранник, одна из граней которого
- 117. Построить недостающие проекции точек, лежащих на поверхности многогранника соблюдая условия видимости
- 118. Построить недостающие проекции точек, лежащих на поверхности многогранника соблюдая условия видимости
- 119. Построить недостающие проекции точек, лежащих на поверхности многогранника соблюдая условия видимости
- 120. Построить недостающие проекции точек, лежащих на поверхности многогранника соблюдая условия видимости
- 121. Построить недостающие проекции точек, лежащих на поверхности многогранника соблюдая условия видимости
- 122. Построить недостающие проекции точек, лежащих на поверхности многогранника соблюдая условия видимости
- 123. Построить недостающие проекции точек, лежащих на поверхности многогранника соблюдая условия видимости
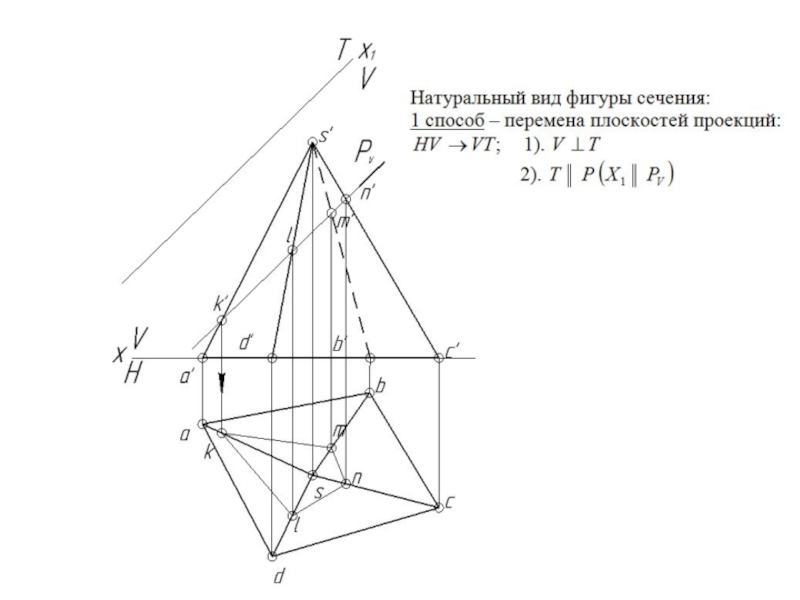
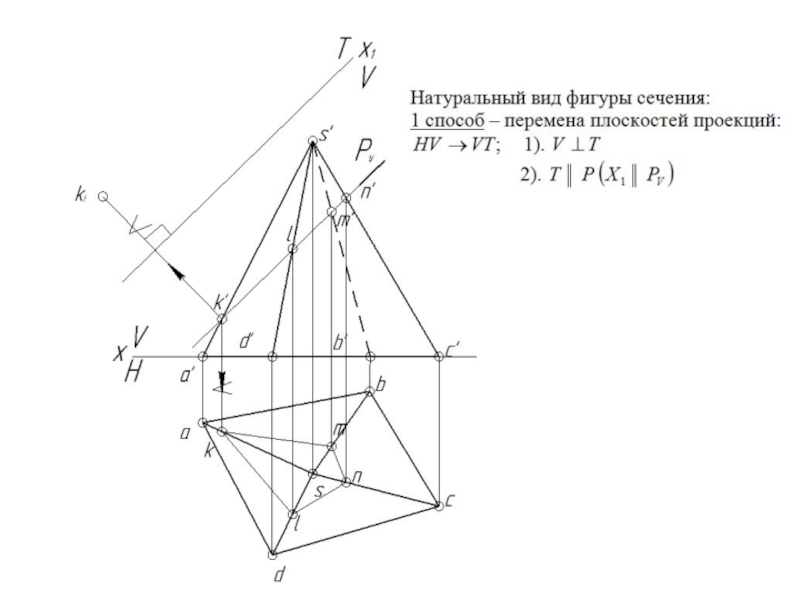
- 124. Пересечение многогранника проецирующей плоскостью. Натуральный вид фигуры
- 125. - пересечение плоскости Р с ребрами пирамиды (способ ребер)
- 126. - пересечение плоскости Р с ребрами пирамиды
- 127. - пересечение плоскости Р с ребрами пирамиды
- 131. Пересечение прямой с поверхностью многогранника Точки пересечения
- 132. Пересечение прямой с поверхностью многогранника Точки пересечения
- 133. Пересечение прямой с поверхностью многогранника Точки пересечения
- 134. Пересечение прямой с поверхностью многогранника Точки пересечения
- 135. Пересечение прямой с поверхностью многогранника Точки пересечения
- 136. Пересечение прямой с поверхностью многогранника Точки пересечения
- 137. Пересечение прямой с поверхностью многогранника Точки пересечения
- 138. Взаимное пересечение многогранников Линию взаимного пересечения двух
- 139. Пример: Построить пересечения поверхности пирамиды с поверхностью призмы
- 140. Способ ребер: Первое ребро призмы пересекает грань
- 141. Горизонтальная проекция точек линии пересечения 1…6, 7,
- 142. Горизонтальная проекция точек линии пересечения 1…6, 7,
- 143. Горизонтальная проекция точек линии пересечения 1…6, 7,
- 144. Точки 5 и 6 определяем по их
- 145. Точки 5 и 6 определяем по их принадлежности прямой SE.
- 146. Точки 5 и 6 определяем по их
- 147. Далее, в определенной последовательности соединяем прямыми линиями
- 148. Профильную проекцию многогранников и линию пересечения строим
- 149. Профильную проекцию многогранников и линию пересечения строим
- 150. Плоскость Р (⊥V) пересекает пирамиду по треугольнику
- 151. Плоскость Р (⊥V) пересекает пирамиду по треугольнику
- 152. Натуральный вид фигуры сечения многогранников плоскостью Р
- 153. Натуральные величины точек фигуры сечения по координате
- 154. Натуральные величины точек фигуры сечения по координате
- 155. Далее, в натуральном виде фигуры сечения вырезаем
- 156. Далее, в натуральном виде фигуры сечения вырезаем

Слайд 2КРИВЫЕ ЛИНИИ И ПОВЕРХНОСТИ
Кривые линии
Определение: Кривую линию можно рассматривать как траекторию
Кривая линия, все точки которой принадлежат плоскости, называется плоской.
Кривая линия, все точки которой не принадлежат одной плоскости, называется пространственной или линией двоякой кривизны.
Если движение линии происходит по какому-либо закону, то поверхность рассматривают как закономерную, в противном случае поверхность считают незакономерной или случайной.

Слайд 3Для построения проекций кривой линии необходимо построить проекции ряда принадлежащих ей
Чтобы отчетливее по чертежу представить себе кривую в пространстве, следует на чертеже указывать проекции характерных ее точек: точки наиболее удаленные от плоскостей проекций и наиболее близкие к ним, точки перегиба и т.п.

Слайд 4Образование поверхности
На чертеже поверхности задают с помощью образующей и направляющих.
Образующая -
Направляющая - одна или несколько неподвижных линий (прямых, кривых), по которым скользит образующая, сохраняя определенное положение в пространстве и соблюдая условия перемещения образующей в пространстве.
AB - образующая
MN - направляющая
S - условие перемещения

Слайд 5Классификация поверхностей
По типу образующей:
линейчатые – образующая прямая линия (цилиндр, конус);
нелинейчатые -
По типу поверхности:
развертываемые – могут быть совмещены с плоскостью всеми своими точками без разрывов и складок (цилиндр, конус);
неразвертываемые – в противном случае (сфера, тор).
;нелинейчатые - образующая кривая линия (сфера,")
Слайд 6ПОВЕРХНОСТИ ВРАЩЕНИЯ
1. Поверхность вращения общего вида
Поверхностью вращения общего вида называют поверхность,
Поверхность вращения задают образующей ABCD и положением оси вращения .
О1
О2
О1
О2


Слайд 81. Поверхность вращения общего вида
ABCD – образующая
O1O2 - ось
Каждая из точек криволинейной образующей при вращении вокруг оси (O1O2⊥ H) описывает окружность:

Слайд 9ABCD – образующая
O1O2 - ось вращения
Каждая из точек криволинейной
параллель - сечение поверхности плоскостью, перпендикулярной к оси вращения, представляет собой окружность
экватор – наибольшая параллель;
горло - наименьшая параллель.
Линии, которые возникают при пересечении поверхности плоскостью, проходящей через ось, например, плоскостью Q называют меридианами, а сами плоскости – меридиональными.
Фронтальная плоскость, проходящая через ось вращения – плоскость главного меридиана, а фронтальный очерк – главный меридиан.
1. Поверхность вращения общего вида

Слайд 10Недостающие проекции точек, определяются по признаку принадлежности с помощью параллелей проходящих
1. Поверхность вращения общего вида

Слайд 11Недостающие проекции точек, определяются по признаку принадлежности с помощью параллелей проходящих
1. Поверхность вращения общего вида

Слайд 12Недостающие проекции точек, определяются по признаку принадлежности с помощью параллелей проходящих
1. Поверхность вращения общего вида

Слайд 13Недостающие проекции точек, определяются по признаку принадлежности с помощью параллелей проходящих
Видимость:
- точка видна на фронтальной проекции, если расположена до плоскости главного меридиана;
1. Поверхность вращения общего вида

Слайд 14Недостающие проекции точек, определяются по признаку принадлежности с помощью параллелей проходящих
Видимость:
- точка видна на фронтальной проекции, если расположена до плоскости главного меридиана;
- точка видна на горизонтальной проекции, если она расположена выше экватора и лежит на параллели, диаметр которой больше диаметров всех параллелей, распложенных выше точки.
1. Поверхность вращения общего вида

Слайд 15Поверхности линейчатые развертываемые
Цилиндрическая поверхность общего вида - образующая AB проходит

Слайд 16Поверхности линейчатые развертываемые
Цилиндрическая поверхность общего вида - образующая AB проходит

Слайд 17Поверхности линейчатые развертываемые
Цилиндрическая поверхность общего вида - образующая AB проходит

Слайд 18Поверхности линейчатые развертываемые
Цилиндрическая поверхность общего вида - образующая AB проходит

Слайд 192. Частные виды поверхностей вращения
1). Цилиндр вращения (прямой круговой цилиндр)– линейчатая,
АВ – образующая
О1О2 – ось вращения
. Цилиндр вращения (прямой круговой цилиндр)– линейчатая, развертываемая, алгебраическая поверхность второго")
Слайд 201). Цилиндр вращения (прямой круговой цилиндр)– линейчатая, развертываемая, алгебраическая поверхность второго
АВ – образующая
О1О2 – ось вращения
2. Частные виды поверхностей вращения
. Цилиндр вращения (прямой круговой цилиндр)– линейчатая, развертываемая, алгебраическая поверхность второго порядка, получается при вращении")
Слайд 211). Цилиндр вращения (прямой круговой цилиндр)– линейчатая, развертываемая, алгебраическая поверхность второго
АВ – образующая
О1О2 – ось вращения
k' → k - ?
2. Частные виды поверхностей вращения
. Цилиндр вращения (прямой круговой цилиндр)– линейчатая, развертываемая, алгебраическая поверхность второго порядка, получается при вращении")
Слайд 221). Цилиндр вращения (прямой круговой цилиндр)– линейчатая, развертываемая, алгебраическая поверхность второго
АВ – образующая
О1О2 – ось вращения
k' → k - ?
2. Частные виды поверхностей вращения
. Цилиндр вращения (прямой круговой цилиндр)– линейчатая, развертываемая, алгебраическая поверхность второго порядка, получается при вращении")
Слайд 23 Коническая поверхность общего вида - образующая SA проходит через некоторую
SA - образующая MN – направляющая
")
Слайд 24SA - образующая
K ∈ Кон ⇒ k' → k - ?
Коническая поверхность общего вида - образующая SA проходит через некоторую неподвижную точку S (вершину) и последовательно через все точки некоторой кривой направляющей MN.

Слайд 25 Коническая поверхность общего вида - образующая SA проходит через некоторую
SA - образующая MN – направляющая
K ∈ Кон ⇒ k' → k - ?
K ∈ S2 ⇒ k' ∈ s’2’; k ∈ s2
")
Слайд 26SA - образующая
K ∈ Кон ⇒ k' → k - ?
K ∈ S2 ⇒ k' ∈ s’2’; k ∈ s2
Коническая поверхность общего вида - образующая SA проходит через некоторую неподвижную точку S (вершину) и последовательно через все точки некоторой кривой направляющей MN.

Слайд 27SA - образующая
K ∈ Кон ⇒ k' → k - ?
K ∈ S2 ⇒ k' ∈ s’2’; k ∈ s2
Коническая поверхность общего вида - образующая SA проходит через некоторую неподвижную точку S (вершину) и последовательно через все точки некоторой кривой направляющей MN.

Слайд 282). Конус вращения – линейчатая, развертываемая, алгебраическая поверхность второго порядка, получается
SА – образующая
SO – ось вращения
Q ∩Кон по прямым S1, S2 (образующим) (Q ∈ S)
. Конус вращения – линейчатая, развертываемая, алгебраическая поверхность второго порядка, получается при вращении прямой образующей")
Слайд 292). Конус вращения – линейчатая, развертываемая, алгебраическая поверхность второго порядка, получается
SА – образующая
SO – ось вращения
Q ∩Кон по прямым S1, S2 (образующим) (Q ∈ S)
. Конус вращения – линейчатая, развертываемая, алгебраическая поверхность второго порядка, получается при вращении прямой образующей")
Слайд 302). Конус вращения – линейчатая, развертываемая, алгебраическая поверхность второго порядка, получается
Т ∩ Кон по окружности 3,4 (T ⊥ SO)
. Конус вращения – линейчатая, развертываемая, алгебраическая поверхность второго порядка, получается при вращении прямой образующей")
Слайд 312). Конус вращения – линейчатая, развертываемая, алгебраическая поверхность второго порядка, получается
Т ∩ Кон по окружности 3,4 (T ⊥ SO)
R
R
. Конус вращения – линейчатая, развертываемая, алгебраическая поверхность второго порядка, получается при вращении прямой образующей")
Слайд 322). Конус вращения – линейчатая, развертываемая, алгебраическая поверхность второго порядка, получается
U ∩ Кон = Парабола 5,6,7 (U ⎟⎟ одной образующей)
. Конус вращения – линейчатая, развертываемая, алгебраическая поверхность второго порядка, получается при вращении прямой образующей")
Слайд 332). Конус вращения – линейчатая, развертываемая, алгебраическая поверхность второго порядка, получается
U ∩ Кон = Парабола 5,6,7 (U ⎟⎟ одной образующей)
. Конус вращения – линейчатая, развертываемая, алгебраическая поверхность второго порядка, получается при вращении прямой образующей")
Слайд 342). Конус вращения – линейчатая, развертываемая, алгебраическая поверхность второго порядка, получается
R ∩ Кон = Гипербола 8,9,10 (R⎟⎟ двум образующим)
. Конус вращения – линейчатая, развертываемая, алгебраическая поверхность второго порядка, получается при вращении прямой образующей")
Слайд 352). Конус вращения – линейчатая, развертываемая, алгебраическая поверхность второго порядка, получается
R ∩ Кон = Гипербола 8,9,10 (R⎟⎟ двум образующим)
. Конус вращения – линейчатая, развертываемая, алгебраическая поверхность второго порядка, получается при вращении прямой образующей")
Слайд 362). Конус вращения – линейчатая, развертываемая, алгебраическая поверхность второго порядка, получается
Р∩ Кон = Эллипс (P ∩ все образующие)
. Конус вращения – линейчатая, развертываемая, алгебраическая поверхность второго порядка, получается при вращении прямой образующей")
Слайд 372). Конус вращения – линейчатая, развертываемая, алгебраическая поверхность второго порядка, получается
1'2' - большая ось эллипса
. Конус вращения – линейчатая, развертываемая, алгебраическая поверхность второго порядка, получается при вращении прямой образующей")
Слайд 382). Конус вращения – линейчатая, развертываемая, алгебраическая поверхность второго порядка, получается
34 – малая ось эллипса
1'2' - большая ось эллипса
. Конус вращения – линейчатая, развертываемая, алгебраическая поверхность второго порядка, получается при вращении прямой образующей")
Слайд 392). Конус вращения – линейчатая, развертываемая, алгебраическая поверхность второго порядка, получается
34 – малая ось эллипса
1'2' - большая ось эллипса
. Конус вращения – линейчатая, развертываемая, алгебраическая поверхность второго порядка, получается при вращении прямой образующей")
Слайд 402). Конус вращения – линейчатая, развертываемая, алгебраическая поверхность второго порядка, получается
34 – малая ось эллипса
1'2' - большая ось эллипса
. Конус вращения – линейчатая, развертываемая, алгебраическая поверхность второго порядка, получается при вращении прямой образующей")
Слайд 412). Конус вращения – линейчатая, развертываемая, алгебраическая поверхность второго порядка, получается
34 – малая ось эллипса
1'2' - большая ось эллипса
. Конус вращения – линейчатая, развертываемая, алгебраическая поверхность второго порядка, получается при вращении прямой образующей")
Слайд 422). Конус вращения – линейчатая, развертываемая, алгебраическая поверхность второго порядка, получается
34 – малая ось эллипса
1'2' - большая ось эллипса
. Конус вращения – линейчатая, развертываемая, алгебраическая поверхность второго порядка, получается при вращении прямой образующей")
Слайд 432). Конус вращения – линейчатая, развертываемая, алгебраическая поверхность второго порядка, получается
34 – малая ось эллипса
1'2' - большая ось эллипса
. Конус вращения – линейчатая, развертываемая, алгебраическая поверхность второго порядка, получается при вращении прямой образующей")
Слайд 442). Конус вращения – линейчатая, развертываемая, алгебраическая поверхность второго порядка, получается
34 – малая ось эллипса
1'2' - большая ось эллипса
. Конус вращения – линейчатая, развертываемая, алгебраическая поверхность второго порядка, получается при вращении прямой образующей")
Слайд 452). Конус вращения – линейчатая, развертываемая, алгебраическая поверхность второго порядка, получается
34 – малая ось эллипса
1'2' - большая ось эллипса
. Конус вращения – линейчатая, развертываемая, алгебраическая поверхность второго порядка, получается при вращении прямой образующей")
Слайд 463). Сфера – не линейчатая, не развёртываемая, алгебраическая поверхность второго порядка,
2. Частные виды поверхностей вращения
. Сфера – не линейчатая, не развёртываемая, алгебраическая поверхность второго порядка, получается при вращении окружности")
Слайд 472. Частные виды поверхностей вращения
3). Сфера – не линейчатая, не развёртываемая,
. Сфера – не линейчатая, не развёртываемая, алгебраическая поверхность второго порядка,")
Слайд 48Очерк сферы на любую ПП – окружность:
- на плоскости Н –
- на плоскости V - главный меридиан;
- на плоскости W - профильный меридиан.
Окружности параллельные экватору – параллели.

Слайд 49Видимость сферической поверхности на плоскости Н определяет экватор:
точки выше экватора
Видимость сферической поверхности на плоскости V определяет главный меридиан, на плоскости W – профильный меридиан.

Слайд 50a → a', a″ ?
Точка А принадлежит экватору на
Профильная проекция т. А определяется координатным методом по координате YA.

Слайд 51b'→ b, b″ ?
Точка В принадлежит главному меридиану на

Слайд 52b'→ b, b″ ?
Точка В принадлежит главному меридиану на
( )

Слайд 53 c″ → c ,c' ?
Точка С принадлежит профильному меридиану
( )

Слайд 54 c″ → c ,c' ?
Точка С принадлежит профильному меридиану
( )
( )

Слайд 55m' →m, m″ ?
Точка М принадлежит параллели на фронтальной ПП
( )
( )

Слайд 56m' →m, m″ ?
Точка М принадлежит параллели на фронтальной ПП
( )
( )
( )

Слайд 574). Тор – не линейчатая, не развёртываемая, алгебраическая поверхность четвертого порядка,
Образующая – окружность радиуса R
Ось вращения – О1О2
Торовая поверхность образуется путем вращения окружности радиуса R вокруг оси О1О2
О1
О2
. Тор – не линейчатая, не развёртываемая, алгебраическая поверхность четвертого порядка, получается при вращении окружности")
Слайд 58Торовая поверхность образуется путем вращения окружности радиуса R вокруг оси О1О2
Образующая – окружность радиуса R
Ось вращения – О1О2

Слайд 59Торовая поверхность образуется путем вращения окружности радиуса R вокруг оси О1О2
Образующая – окружность радиуса R
Ось вращения – О1О2

Слайд 60Любая точка образующей окружности (M, N, K) при вращении вокруг оси
Образующая – окружность радиуса R
Ось вращения – О1О2
Торовая поверхность образуется путем вращения окружности радиуса R вокруг оси О1О2 так, что центр окружности радиуса R описывает окружность радиуса L.
 при вращении вокруг оси О1О2 перемещается по окружности")
Слайд 61Горизонтальная проекция торовой поверхности – две концентрические окружности, фронтальная – справа
Любая точка образующей окружности (M, N, K) при вращении вокруг оси О1О2 перемещается по окружности своего радиуса.
Образующая – окружность радиуса R
Ось вращения – О1О2
Торовая поверхность образуется путем вращения окружности радиуса R вокруг оси О1О2 так, что центр окружности радиуса R описывает окружность радиуса L.

Слайд 62Тор имеет две системы круговых сечений:
1). Плоскости, перпендикулярные к оси вращения
Торовая поверхность образуется путем вращения окружности радиуса R вокруг оси О1О2 так, что центр окружности радиуса R описывает окружность радиуса L.
. Плоскости, перпендикулярные к оси вращения (Р) образуют две концентрические")
Слайд 63Тор имеет две системы круговых сечений:
1). Плоскости, перпендикулярные к оси вращения
Торовая поверхность образуется путем вращения окружности радиуса R вокруг оси О1О2 так, что центр окружности радиуса R описывает окружность радиуса L.
. Плоскости, перпендикулярные к оси вращения (Р) образуют две концентрические")
Слайд 642). Плоскости, проходящие через ось вращения (Q) пересекает поверхность тора по
Тор имеет две системы круговых сечений:
1). Плоскости, перпендикулярные к оси вращения (Р) образуют две концентрические окружности – с радиусами R1 и R2.
Торовая поверхность образуется путем вращения окружности радиуса R вокруг оси О1О2 так, что центр окружности радиуса R описывает окружность радиуса L.
. Плоскости, проходящие через ось вращения (Q) пересекает поверхность тора по двум образующим окружностям радиуса")
Слайд 65Положение точки на поверхности тора определяется по признаку принадлежности точки линии
Торовая поверхность образуется путем вращения окружности радиуса R вокруг оси О1О2 так, что центр окружности радиуса R описывает окружность радиуса L.

Слайд 66Торовая поверхность образуется путем вращения окружности радиуса R вокруг оси О1О2
Положение точки на поверхности тора определяется по признаку принадлежности точки линии данной поверхности. Например, если задана фронтальная проекция точки А и требуется построить горизонтальную проекцию точки, то, как в случае любой поверхности вращения, через точку следует провести окружность, построить проекции этой окружности, и найти на одной из них недостающую проекцию точки.

Слайд 67Вид торовой поверхности зависит от соотношения величин L и R:
Если L
При L = R, то тор называют закрытый или замкнутый.
Если L < R, то тор называют самопересекающийся.
Замкнутый



Слайд 70ВЗАИМНОЕ ПЕРЕСЕЧЕЕ КРИВОЛИНЕЙНЫХ ПОВЕРХНОСТЕЙ
Общим способом построения линии пересечения криволинейных поверхностей является
Две поверхности, пересекаясь, образуют некоторые линии, представляющие собой множество точек, общих как для одной, так и для другой поверхности. Таким образом, задача построения линии пересечения двух заданных поверхностей состоит в определении точек, принадлежащих обеим поверхностям.
Кривые поверхности в общем случае пересекаются по кривым линиям: P ∩ Q=L

Слайд 71 Общим способом построения линии пересечения криволинейных поверхностей является нахождение точек этой
Две поверхности, пересекаясь, образуют некоторые линии, представляющие собой множество точек, общих как для одной, так и для другой поверхности. Таким образом, задача построения линии пересечения двух заданных поверхностей состоит в определении точек, принадлежащих обеим поверхностям.
ВЗАИМНОЕ ПЕРЕСЕЧЕЕ КРИВОЛИНЕЙНЫХ ПОВЕРХНОСТЕЙ
Кривые поверхности в общем случае пересекаются по кривым линиям: P ∩ Q=L
Алгоритм определения точек линии пересечения:
1). Пересечь заданные поверхности P и Q вспомогательной секущей поверхностью – T.

Слайд 72 Общим способом построения линии пересечения криволинейных поверхностей является нахождение точек этой
Две поверхности, пересекаясь, образуют некоторые линии, представляющие собой множество точек, общих как для одной, так и для другой поверхности. Таким образом, задача построения линии пересечения двух заданных поверхностей состоит в определении точек, принадлежащих обеим поверхностям.
ВЗАИМНОЕ ПЕРЕСЕЧЕЕ КРИВОЛИНЕЙНЫХ ПОВЕРХНОСТЕЙ
Кривые поверхности в общем случае пересекаются по кривым линиям: P ∩ Q=L
Алгоритм определения точек линии пересечения:
1). Пересечь заданные поверхности P и Q вспомогательной секущей поверхностью – T.
2). Построить линии пересечения вспомогательной поверхности (T) с каждой из заданных поверхностей (P и Q):
Ti ∩ P= ni;

Слайд 73 Общим способом построения линии пересечения криволинейных поверхностей является нахождение точек этой
Две поверхности, пересекаясь, образуют некоторые линии, представляющие собой множество точек, общих как для одной, так и для другой поверхности. Таким образом, задача построения линии пересечения двух заданных поверхностей состоит в определении точек, принадлежащих обеим поверхностям.
ВЗАИМНОЕ ПЕРЕСЕЧЕЕ КРИВОЛИНЕЙНЫХ ПОВЕРХНОСТЕЙ
Кривые поверхности в общем случае пересекаются по кривым линиям: P ∩ Q=L
Алгоритм определения точек линии пересечения:
1). Пересечь заданные поверхности P и Q вспомогательной секущей поверхностью – T.
2). Построить линии пересечения вспомогательной поверхности (T) с каждой из заданных поверхностей (P и Q):
Ti ∩ P= ni;
Ti ∩ Q= mi

Слайд 74 Общим способом построения линии пересечения криволинейных поверхностей является нахождение точек этой
Две поверхности, пересекаясь, образуют некоторые линии, представляющие собой множество точек, общих как для одной, так и для другой поверхности. Таким образом, задача построения линии пересечения двух заданных поверхностей состоит в определении точек, принадлежащих обеим поверхностям.
ВЗАИМНОЕ ПЕРЕСЕЧЕЕ КРИВОЛИНЕЙНЫХ ПОВЕРХНОСТЕЙ
Кривые поверхности в общем случае пересекаются по кривым линиям: P ∩ Q=L
Алгоритм определения точек линии пересечения:
1). Пересечь заданные поверхности P и Q вспомогательной секущей поверхностью – T.
2). Построить линии пересечения вспомогательной поверхности (T) с каждой из заданных поверхностей (P и Q):
Ti ∩ P= ni;
Ti ∩ Q= mi
3). Построить точку пересечения полученных линий пересечения:
ni ∩ mi= Ki

Слайд 75Применение плоскостей в качестве вспомогательной секущей поверхности.
План решения задачи:
I). Определение характерных
- наивысшей и наинизшей;
- точки, определяющие видимость линии пересечения.
II). Определение промежуточных точек по разработанному алгоритму.
III). Определение видимости линии пересечения.
. Определение характерных точек: - наивысшей и наинизшей; -")
Слайд 76Т.к. общая плоскость симметрии параллельна фронтальной ПП, то образующие сферы и
Применение плоскостей в качестве вспомогательной секущей поверхности.

Слайд 77Применение плоскостей в качестве вспомогательной секущей поверхности.
Т.к. общая плоскость симметрии параллельна

Слайд 78Промежуточные точки находим по алгоритму:
1). T1 – вспомогательная секущая плоскость
Применение плоскостей в качестве вспомогательной секущей поверхности.
. T1 – вспомогательная секущая плоскость (|| H) Применение плоскостей")
Слайд 79Промежуточные точки находим по алгоритму:
1). T1 – вспомогательная секущая плоскость
2). T1 ∩ Сф.= L1 (окр. R1);
T1 ∩ Кон.= L2 (окр. R2)
3). L1 ∩ L2 =3040
Применение плоскостей в качестве вспомогательной секущей поверхности.
R1
R2
L1
L2
. T1 – вспомогательная секущая плоскость (|| H) 2). T1")
Слайд 80Вводя новые вспомогательные горизонтальные плоскости и повторяя приведенные построения, можно найти
Применение плоскостей в качестве вспомогательной секущей поверхности.

Слайд 81Применение плоскостей в качестве вспомогательной секущей поверхности.
Вводя новые вспомогательные горизонтальные плоскости

Слайд 82Применение плоскостей в качестве вспомогательной секущей поверхности.
Вводя новые вспомогательные горизонтальные плоскости

Слайд 83Применение плоскостей в качестве вспомогательной секущей поверхности.
Вводя новые вспомогательные горизонтальные плоскости

Слайд 84Применение плоскостей в качестве вспомогательной секущей поверхности.
Видимость линии пересечения:
на плоскости Н
на плоскости V – определяет общая плоскость симметрии
Вид V
Экв
Общ. плоскость
симметрии
Вводя новые вспомогательные горизонтальные плоскости и повторяя приведенные построения, можно найти достаточное количество точек, соединив которые плавной кривой - получить проекции линии пересечения.

Слайд 85Применение плоскостей в качестве вспомогательной секущей поверхности.
Вид V
Общ. плоскость
симметрии


Слайд 87ВЗАИМНОЕ ПЕРЕСЕЧЕЕ КРИВОЛИНЕЙНЫХ ПОВЕРХНОСТЕЙ
Применение сфер в качестве вспомогательной секущей поверхности.
При построении
В основе применения сфер в качестве вспомогательных секущих поверхностей лежит свойство соосных поверхностей вращения пересекаться по общим окружностям.
Соосными называют поверхности, полученные вращением вокруг одной оси (поверхности с общей осью).
Свойство соосных поверхностей: две соосные поверхности вращения пересекаются по окружности, плоскость которой перпендикулярна оси вращения.
О1
О2
Плоскость окружности перпендикулярна оси вращения и проецируется на фронтальную ПП в виде отрезка m'.

Слайд 88Необходимые условия:
1 Пересекающиеся поверхности должны иметь общую плоскость симметрии.
2. Пересекающиеся поверхности

Слайд 89Необходимые условия:
1 Пересекающиеся поверхности должны иметь общую плоскость симметрии.
2. Пересекающиеся поверхности
O1
1). Цил. и Сф. – соосные поверхности (O1)

Слайд 90Необходимые условия:
1 Пересекающиеся поверхности должны иметь общую плоскость симметрии.
2. Пересекающиеся поверхности
O1
1). Цил. и Сф. – соосные поверхности (O1)
Цил. ∩ Сф. = L1 (окр.) ⊥ O1

Слайд 91Необходимые условия:
1 Пересекающиеся поверхности должны иметь общую плоскость симметрии.
2. Пересекающиеся поверхности
O1
O2
2). Кон. и Сф. – соосные поверхности (O2)

Слайд 92Необходимые условия:
1 Пересекающиеся поверхности должны иметь общую плоскость симметрии.
2. Пересекающиеся поверхности
O1
O2

Слайд 93Необходимые условия:
1 Пересекающиеся поверхности должны иметь общую плоскость симметрии.
2. Пересекающиеся поверхности
O1
O2
3). Тор и Сф. – соосные поверхности (O1)

Слайд 94Необходимые условия:
1 Пересекающиеся поверхности должны иметь общую плоскость симметрии.
2. Пересекающиеся поверхности
O1
O2
3). Тор и Сф. – соосные поверхности (O1)
Тор ∩ Сф = L3 (окр.) ⊥ O1

Слайд 95Необходимые условия:
1 Пересекающиеся поверхности должны иметь общую плоскость симметрии.
2. Пересекающиеся поверхности
O1
O2
4). Сф. и Сф.1 – соосные поверхности (O2)

Слайд 96Необходимые условия:
1 Пересекающиеся поверхности должны иметь общую плоскость симметрии.
2. Пересекающиеся поверхности
O1
O2
4). Сф. и Сф.1 – соосные поверхности (O2)
Сф. ∩ Сф.1 = L4 (окр.) ⊥ O2

Слайд 97Применение сфер с постоянным центром
(Концентрических сфер)
Условие применения:
1). Обе поверхности тела вращения
2).
Центр вспомогательных секущих сфер находится в точке пересечения осей O1 и O2 заданных поверхностей.
Условие применения:1). Обе поверхности тела вращения2). Оси поверхностей пересекаютсяЦентр вспомогательных")
Слайд 98Очерковые образующие конуса и цилиндра пересекаются, т.к. лежат в общей плоскости
Применение сфер с постоянным центром
(Концентрических сфер)
Условие применения:
1). Обе поверхности тела вращения
2). Оси поверхностей пересекаются

Слайд 99Применение сфер с постоянным центром
(Концентрических сфер)
Условие применения:
1). Обе поверхности тела вращения
2).
Алгоритм:
1). Сф. R1 – вспомогательная секущая поверхность
Условие применения:1). Обе поверхности тела вращения2). Оси поверхностей пересекаютсяАлгоритм:1). Сф.")
Слайд 100Применение сфер с постоянным центром
(Концентрических сфер)
Условие применения:
1). Обе поверхности тела вращения
2).
Алгоритм:
1). Сф. R1 – вспомогательная секущая поверхность
2). Сф. ∩ Кон. = L1 (окр.) ⊥ O1 - как соосные поверхности
Сф. ∩ Цил. = L2 (окр.) ⊥ O2 - как соосные поверхности
Условие применения:1). Обе поверхности тела вращения2). Оси поверхностей пересекаютсяАлгоритм:1). Сф.")
Слайд 101Применение сфер с постоянным центром
(Концентрических сфер)
Условие применения:
1). Обе поверхности тела вращения
2).
Алгоритм:
1). Сф. R1 – вспомогательная секущая поверхность
2). Сф. ∩ Кон. = L1 (окр.) ⊥ O1 - как соосные поверхности
Сф. ∩ Цил. = L2 (окр.) ⊥ O2 - как соосные поверхности
3). L1 ∩ L2 = 3, 4
Условие применения:1). Обе поверхности тела вращения2). Оси поверхностей пересекаютсяАлгоритм:1). Сф.")
Слайд 102Применение сфер с постоянным центром
(Концентрических сфер)
Условие применения:
1). Обе поверхности тела вращения
2).
Алгоритм:
1). Сф. R1 – вспомогательная секущая поверхность
2). Сф. ∩ Кон. = L1 (окр.) ⊥ O1 - как соосные поверхности
Сф. ∩ Цил. = L2 (окр.) ⊥ O2 - как соосные поверхности
3). L1 ∩ L2 = 3, 4
Наименьшим радиусом вспомогательной сферы является сфера с наибольшим радиусом, вписанная в одну из поверхностей (в данном случае в конус).
Условие применения:1). Обе поверхности тела вращения2). Оси поверхностей пересекаютсяАлгоритм:1). Сф.")
Слайд 103Применение сфер с постоянным центром
(Концентрических сфер)
Условие применения:
1). Обе поверхности тела вращения
2).
Алгоритм:
1). Сф. R1 – вспомогательная секущая поверхность
2). Сф. ∩ Кон. = L1 (окр.) ⊥ O1 - как соосные поверхности
Сф. ∩ Цил. = L2 (окр.) ⊥ O2 - как соосные поверхности
3). L1 ∩ L2 = 3, 4
Наименьшим радиусом вспомогательной сферы является сфера с наибольшим радиусом, вписанная в одну из поверхностей (в данном случае в конус).
Условие применения:1). Обе поверхности тела вращения2). Оси поверхностей пересекаютсяАлгоритм:1). Сф.")
Слайд 104Применение сфер с постоянным центром
(Концентрических сфер)
Условие применения:
1). Обе поверхности тела вращения
2).
Алгоритм:
1). Сф. R1 – вспомогательная секущая поверхность
2). Сф. ∩ Кон. = L1 (окр.) ⊥ O1 - как соосные поверхности
Сф. ∩ Цил. = L2 (окр.) ⊥ O2 - как соосные поверхности
3). L1 ∩ L2 = 3, 4
Наименьшим радиусом вспомогательной сферы является сфера с наибольшим радиусом, вписанная в одну из поверхностей (в данном случае в конус).
Условие применения:1). Обе поверхности тела вращения2). Оси поверхностей пересекаютсяАлгоритм:1). Сф.")
Слайд 105Применение сфер с постоянным центром
(Концентрических сфер)
Условие применения:
1). Обе поверхности тела вращения
2).
Алгоритм:
1). Сф. R1 – вспомогательная секущая поверхность
2). Сф. ∩ Кон. = L1 (окр.) ⊥ O1 - как соосные поверхности
Сф. ∩ Цил. = L2 (окр.) ⊥ O2 - как соосные поверхности
3). L1 ∩ L2 = 3, 4
Наименьшим радиусом вспомогательной сферы является сфера с наибольшим радиусом, вписанная в одну из поверхностей (в данном случае в конус).
Условие применения:1). Обе поверхности тела вращения2). Оси поверхностей пересекаютсяАлгоритм:1). Сф.")
")
Слайд 107Пересечение прямой с кривой поверхностью
ПРИМЕР: Построить проекции точек пересечения прямой
Плоскость Р пересекает поверхность сферы по окружности, которая отобразиться на горизонтальную ПП в виде отрезка прямой по свойству проецирующей плоскости, на фронтальную ПП по свойству принадлежности точек поверхности сферы – в виде эллипса.
Алгоритм:
1). АВ ⊂ Р(Р⊥ H)

Слайд 108Алгоритм:
1). АВ ⊂ Р(Р⊥ H)
2). Р ∩ Сф = L(l, l')
Плоскость
Пересечение прямой с кривой поверхностью
ПРИМЕР: Построить проекции точек пересечения прямой с поверхностью сферы, соблюдая условия видимости.
. АВ ⊂ Р(Р⊥ H) 2). Р ∩ Сф = L(l, l') Плоскость Р пересекает поверхность сферы")
Слайд 109Алгоритм:
1). АВ ⊂ Р(Р⊥ H)
2). Р ∩ Сф = L(l, l')
Плоскость
Пересечение прямой с кривой поверхностью
ПРИМЕР: Построить проекции точек пересечения прямой с поверхностью сферы, соблюдая условия видимости.
. АВ ⊂ Р(Р⊥ H) 2). Р ∩ Сф = L(l, l') Плоскость Р пересекает поверхность сферы")
Слайд 110Алгоритм:
1). АВ ⊂ Р(Р⊥ H)
2). Р ∩ Сф = L(l, l')
Плоскость
Пересечение прямой с кривой поверхностью
ПРИМЕР: Построить проекции точек пересечения прямой с поверхностью сферы, соблюдая условия видимости.
. АВ ⊂ Р(Р⊥ H) 2). Р ∩ Сф = L(l, l') Плоскость Р пересекает поверхность сферы")
Слайд 111Алгоритм:
1). АВ ⊂ Р(Р⊥ H)
2). Р ∩ Сф = L(l, l')
3).
Плоскость Р пересекает поверхность сферы по окружности, которая отобразиться на горизонтальную ПП в виде отрезка прямой по свойству проецирующей плоскости, на фронтальную ПП по свойству принадлежности точек поверхности сферы – в виде эллипса.
Пересечение прямой с кривой поверхностью
ПРИМЕР: Построить проекции точек пересечения прямой с поверхностью сферы, соблюдая условия видимости.
. АВ ⊂ Р(Р⊥ H) 2). Р ∩ Сф = L(l, l') 3). К1К2 = L ∩")
Слайд 112Алгоритм:
1). АВ ⊂ Р(Р⊥ H)
2). Р ∩ Сф = L(l, l')
3).
Видимость точек определяет на:
горизонтальной плоскости - экватор;
Экватор
Главн. меридиан
Пересечение прямой с кривой поверхностью
ПРИМЕР: Построить проекции точек пересечения прямой с поверхностью сферы, соблюдая условия видимости.
. АВ ⊂ Р(Р⊥ H) 2). Р ∩ Сф = L(l, l') 3). К1К2 = L ∩")
Слайд 113Алгоритм:
1). АВ ⊂ Р(Р⊥ H)
2). Р ∩ Сф = L(l, l')
3).
Гл. меридиан
Экватор
Видимость точек определяет на:
горизонтальной плоскости - экватор;
фронтальной плоскости- гл. меридиан
Пересечение прямой с кривой поверхностью
ПРИМЕР: Построить проекции точек пересечения прямой с поверхностью сферы, соблюдая условия видимости.
. АВ ⊂ Р(Р⊥ H) 2). Р ∩ Сф = L(l, l') 3). К1К2 = L ∩")

Слайд 115МНОГОГРАННИКИ
Определение: Многогранником называется тело, поверхность которого есть объединение конечного числа многоугольников.
Призма
Ребра - прямые, по которым пересекаются смежные грани;
Вершина - точка, в которых пересекаются ребра.
Призма прямая – ребра перпендикулярны основанию.
Призма наклонная – ребра не перпендикулярны основанию.

Слайд 116Пирамида – многогранник, одна из граней которого (основание) есть произвольный многоугольник,
Правильная пирамида – в основании лежит правильный многоугольник, и высота пирамиды проходит через центр этого многоугольника.
Усеченная пирамида – плоскость отсекает вершину и пересекает все боковые грани.
Правильные многогранники
(тела Платона):
Тетраэдр – правильный четырехгранник (четыре равносторонних треугольника)
Гексаэдр - правильный шестигранник (куб)
Октаэдр - правильный восьмигранник (восемь равносторонних треугольника)
Додекаэдр - правильный двенадцатигранник (двенадцать правильных пятиугольников)
Икосаэдр - правильный двадцатигранник (двадцать равносторонних треугольников)
 есть произвольный многоугольник, остальные n- граней –")
Слайд 117Построить недостающие проекции точек, лежащих на поверхности
многогранника соблюдая условия видимости

Слайд 118Построить недостающие проекции точек, лежащих на поверхности
многогранника соблюдая условия видимости

Слайд 119Построить недостающие проекции точек, лежащих на поверхности
многогранника соблюдая условия видимости

Слайд 120Построить недостающие проекции точек, лежащих на поверхности
многогранника соблюдая условия видимости

Слайд 121Построить недостающие проекции точек, лежащих на поверхности
многогранника соблюдая условия видимости

Слайд 122Построить недостающие проекции точек, лежащих на поверхности
многогранника соблюдая условия видимости

Слайд 123Построить недостающие проекции точек, лежащих на поверхности
многогранника соблюдая условия видимости

Слайд 124Пересечение многогранника проецирующей плоскостью.
Натуральный вид фигуры сечения.
Сечение многогранника – геометрическая фигура
В общем случае плоскость пересекает многогранник по плоской фигуре - многоугольнику, вид которого зависит от числа граней, пересекаемых плоскостью.
Два способа построения сечения многогранника плоскостью:
1). Способ ребер – по точкам пересечения ребер многогранника с плоскостью (построение сводится к задаче на пересечение прямой с плоскостью).
2). Способ граней – по отрезкам прямых пересечения граней многогранника с плоскостью (построение сводится к задаче на пересечение плоскостей).

")
Слайд 126- пересечение плоскости Р с ребрами пирамиды (способ ребер)
k’l’m’n’- по свойству
k’l’m’n’- по свойству проецирующей плоскости (совпадает с")
Слайд 127- пересечение плоскости Р с ребрами пирамиды (способ ребер)
k’l’m’n’- по свойству
klmn- по принадлежности точек соответствующим ребрам пирамиды:
k’l’m’n’- по свойству проецирующей плоскости (совпадает с")

Слайд 131Пересечение прямой с поверхностью многогранника
Точки пересечения прямой с поверхностью многогранника определяются

Слайд 132Пересечение прямой с поверхностью многогранника
Точки пересечения прямой с поверхностью многогранника определяются

Слайд 133Пересечение прямой с поверхностью многогранника
Точки пересечения прямой с поверхностью многогранника определяются

Слайд 134Пересечение прямой с поверхностью многогранника
Точки пересечения прямой с поверхностью многогранника определяются

Слайд 135Пересечение прямой с поверхностью многогранника
Точки пересечения прямой с поверхностью многогранника определяются

Слайд 136Пересечение прямой с поверхностью многогранника
Точки пересечения прямой с поверхностью многогранника определяются

Слайд 137Пересечение прямой с поверхностью многогранника
Точки пересечения прямой с поверхностью многогранника определяются

Слайд 138Взаимное пересечение многогранников
Линию взаимного пересечения двух многогранников можно построить двумя способами:
1).
Через найденные точки в определенной последовательности проводят ломанную линию – линию пересечения. При этом можно соединять прямыми линиями лишь ту пару точек, которые принадлежат одной и той же грани как одного, так и другого многогранника.
2). Способ граней – по отрезкам прямых, по которым грани одной поверхности пересекаются с гранями другой.
. Способ ребер – по")

Слайд 140Способ ребер:
Первое ребро призмы пересекает грань SAB в точке 1, а
Следовательно:
ребра призмы ∩ гранями пирамиды
в точках 1…6;
ребро пирамиды SB ∩ грань призмы в точках 7, 8

Слайд 141Горизонтальная проекция точек линии пересечения 1…6, 7, 8 – определяется по
Плоскость Т рассекает пирамиду по треугольнику d подобному основанию acb, на котором расположены горизонтальные проекции точек 1…4 .

Слайд 142Горизонтальная проекция точек линии пересечения 1…6, 7, 8 – определяется по
Плоскость Т рассекает пирамиду по треугольнику d подобному основанию acb, на котором расположены горизонтальные проекции точек 1…4 .

Слайд 143Горизонтальная проекция точек линии пересечения 1…6, 7, 8 – определяется по
Плоскость Т рассекает пирамиду по треугольнику d подобному основанию acb, на котором расположены горизонтальные проекции точек 1…4 .




Слайд 147Далее, в определенной последовательности соединяем прямыми линиями лишь ту пару точек,

Слайд 148Профильную проекцию многогранников и линию пересечения строим координатным методом и определяем

Слайд 149Профильную проекцию многогранников и линию пересечения строим координатным методом и определяем

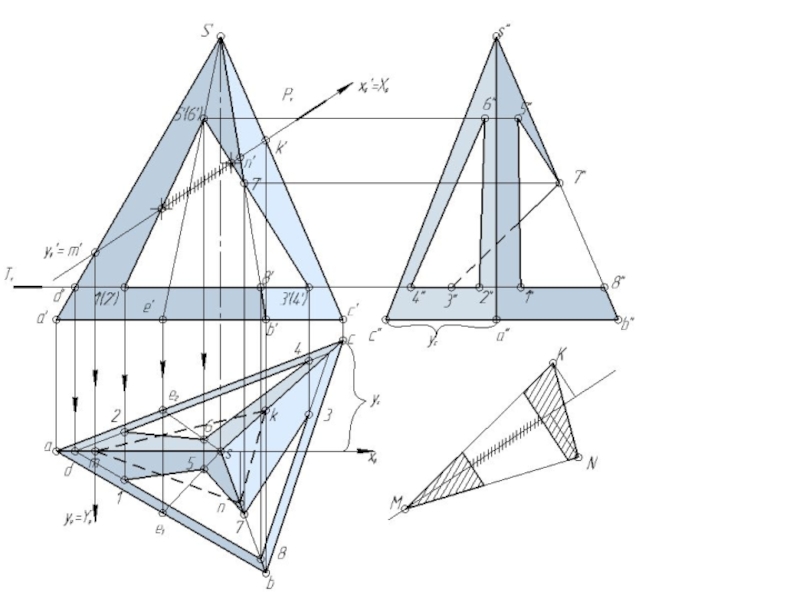
Слайд 150Плоскость Р (⊥V) пересекает пирамиду по треугольнику MNK:
Фронтальная проекция m'n'k' совпадает
Натуральный вид фигуры сечения.
 пересекает пирамиду по треугольнику MNK:Фронтальная проекция m'n'k' совпадает с проецирующим следом плоскости;Натуральный")
Слайд 151Плоскость Р (⊥V) пересекает пирамиду по треугольнику MNK:
Фронтальная проекция m'n'k' совпадает
горизонтальная проекция mnk определяется по принадлежности точек соответствующим ребрам.
Натуральный вид фигуры сечения.
 пересекает пирамиду по треугольнику MNK:Фронтальная проекция m'n'k' совпадает с проецирующим следом плоскости;горизонтальная")
Слайд 152Натуральный вид фигуры сечения многогранников плоскостью Р строим координатным методом:
в плоскости
Координату Xp направляем по следу Pv (Xp = xp') параллельно плоскости V ,
а координату Yp - перпендикулярно плоскости V: Y (Yp = yp')
Натуральный вид фигуры сечения.

Слайд 153Натуральные величины точек фигуры сечения по координате Xp берем с фронтальной
с горизонтальной проекции.
Натуральный вид фигуры сечения.

Слайд 154Натуральные величины точек фигуры сечения по координате Xp берем с фронтальной
с горизонтальной проекции.
Натуральный вид фигуры сечения.

Слайд 155Далее, в натуральном виде фигуры сечения вырезаем окно от призмы
Натуральные величины
с горизонтальной проекции.
Натуральный вид фигуры сечения.

Слайд 156Далее, в натуральном виде фигуры сечения вырезаем окно от призмы
Натуральные величины
с горизонтальной проекции.
Натуральный вид фигуры сечения.