Студент: Курденкова Д.П.
Руководитель работы: Ст. преп. Маркарян Л.В.
Москва 2015г.
НАЦИОНАЛЬНЫЙ ИССЛЕДОВАТЕЛЬСКИЙ ТЕХНОЛОГИЧЕСКИЙ УНИВЕРСИТЕТ «МИСиС»
Институт ИТАСУ
Кафедра «Автоматики и управления в технических системах»
Студент: Курденкова Д.П.
Руководитель работы: Ст. преп. Маркарян Л.В.
Москва 2015г.
НАЦИОНАЛЬНЫЙ ИССЛЕДОВАТЕЛЬСКИЙ ТЕХНОЛОГИЧЕСКИЙ УНИВЕРСИТЕТ «МИСиС»
Институт ИТАСУ
Кафедра «Автоматики и управления в технических системах»


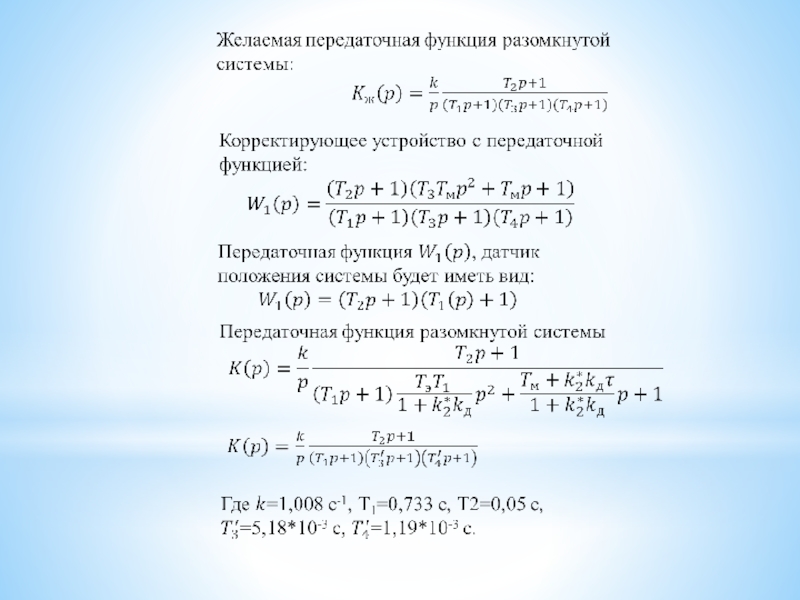
Гидравлический привод
Обладает высокой энергоемкостью, быстродействием, стабильностью скорости при изменяющейся нагрузке, малой инерционностью. Недостаток – возможность утечек.
Пневматический привод
Обладает надежностью, высокой точностью в режиме управления, возможностью работы во взрывоопасных средах.
Недостаток -низкий КПД, значительные колебания скорости исполнительных механизмов при изменяемой нагрузке.
Электромеханический приводОбладает высокой надежностью, точностью, бесшумностью, легкостью регулирования, простотой монтажа,")
По сигналу датчика положения крюка произвести распознавание детали, измерить координаты точки захвата и ориентацию детали
Перейти в положение захвата, ориентировать захватное устройство по отношению к оси детали
Включить электрическое захватное устройство
Перейти в исходное положение
Перенести захватное устройство с деталью к таре
Выключить электрическое захватное устройство
Алгоритм работы промышленного робота




Если не удалось найти и скачать презентацию, Вы можете заказать его на нашем сайте. Мы постараемся найти нужный Вам материал и отправим по электронной почте. Не стесняйтесь обращаться к нам, если у вас возникли вопросы или пожелания:
Email: Нажмите что бы посмотреть
Это сайт презентаций, докладов, проектов, шаблонов в формате PowerPoint. Мы помогаем школьникам, студентам, учителям, преподавателям хранить и обмениваться учебными материалами с другими пользователями.








")