- Главная
- Разное
- Дизайн
- Бизнес и предпринимательство
- Аналитика
- Образование
- Развлечения
- Красота и здоровье
- Финансы
- Государство
- Путешествия
- Спорт
- Недвижимость
- Армия
- Графика
- Культурология
- Еда и кулинария
- Лингвистика
- Английский язык
- Астрономия
- Алгебра
- Биология
- География
- Детские презентации
- Информатика
- История
- Литература
- Маркетинг
- Математика
- Медицина
- Менеджмент
- Музыка
- МХК
- Немецкий язык
- ОБЖ
- Обществознание
- Окружающий мир
- Педагогика
- Русский язык
- Технология
- Физика
- Философия
- Химия
- Шаблоны, картинки для презентаций
- Экология
- Экономика
- Юриспруденция
Приведение системы сил к заданному центру. Теорема Пуансо презентация
Содержание
- 1. Приведение системы сил к заданному центру. Теорема Пуансо
- 2. Теорема1 - О параллельном переносе силы
- 3. Доказательство
- 5. Теорема 2 – О приведении системы сил
- 6. Доказательство
- 8. Используя теорему 1 перенесем все силы в
- 9. Для плоской системы сил главный вектор
- 10. Частные случаи приведения системы сил:
- 11. система сил приводится
- 12. система сил уравновешена.
- 13. РАВНОВЕСИЕ ПРОИЗВОЛЬНОЙ ПЛОСКОЙ СИСТЕМЫ СИЛ Необходимые
- 14. Основная форма условий равновесия для сил, лежащих
- 15. Вторая форма условий равновесия: Для равновесия произвольной
- 17. Третья форма условий равновесия Для равновесия
- 19. Для проверки решения задачи
- 20. РАВНОВЕСИЕ ПЛОСКОЙ СИСТЕМЫ ПАРАЛЛЕЛЬНЫХ СИЛ Пусть все
- 21. Из условия следуют две формы аналитических
- 22. Основная форма условий равновесия Для равновесия
- 23. Вторая форма условий равновесия: Для равновесия
- 25. РАСПРЕДЕЛЕННЫЕ НАГРУЗКИ равномерно распределенная вдоль прямой
- 26. Неравномерно распределенная нагрузка. Параллельные силы
- 27. РАВНОВЕСИЕ СИСТЕМЫ ТЕЛ Связи между частями
- 28. Для определения внутренних и внешних реакций связей
- 29. При действии на трех шарнирную арку
- 30. Статически определимые системы тел Системы тел (тело),

Слайд 2Теорема1 - О параллельном переносе силы
(лемма Пуансо):
силу , не
:силу , не изменяя ее действия на абсолютно")

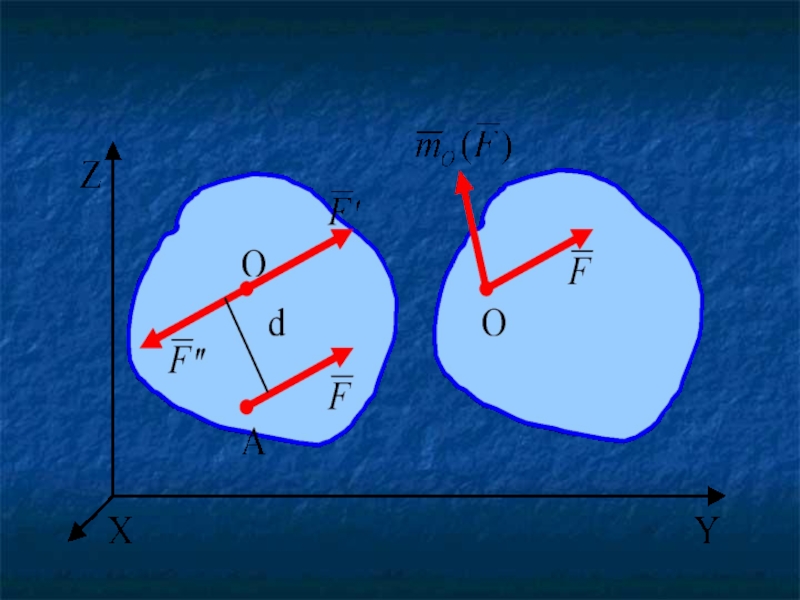
Слайд 5Теорема 2 – О приведении системы сил к заданному центру (теорема
Любая система сил , действующая на абсолютно твердое тело, при приведении к произвольному центру О заменяется главным вектором системы сил, приложенным в центре О и парой сил с моментом , равным главному моменту системы сил относительно центра О.
:Любая система сил ,")

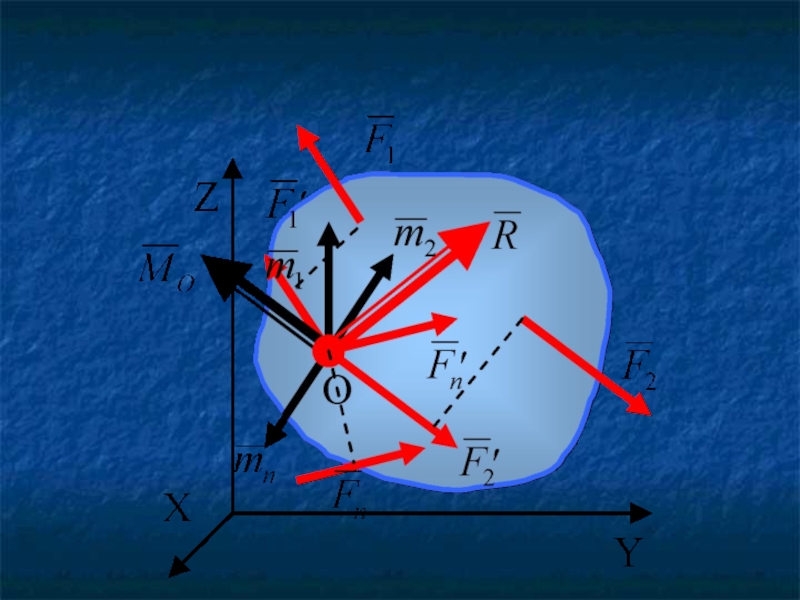
Слайд 8Используя теорему 1 перенесем все силы в центр О прибавляя пары

Слайд 9Для плоской системы сил главный вектор лежит в плоскости действия
X
Y
O
Z
X

Слайд 10Частные случаи приведения системы сил:

Слайд 11
система сил приводится к равнодействующей , приложенной в центреО.
система сил приводится

Слайд 12
система сил уравновешена.
Теорема: Для равновесия любой системы сил необходимо

Слайд 13РАВНОВЕСИЕ ПРОИЗВОЛЬНОЙ ПЛОСКОЙ СИСТЕМЫ СИЛ
Необходимые и достаточные условия равновесия твердого
Из этих векторных уравнений следуют три формы аналитических условий равновесия.

Слайд 14Основная форма условий равновесия
для сил, лежащих в плоскости ОХУ:
Для равновесия произвольной

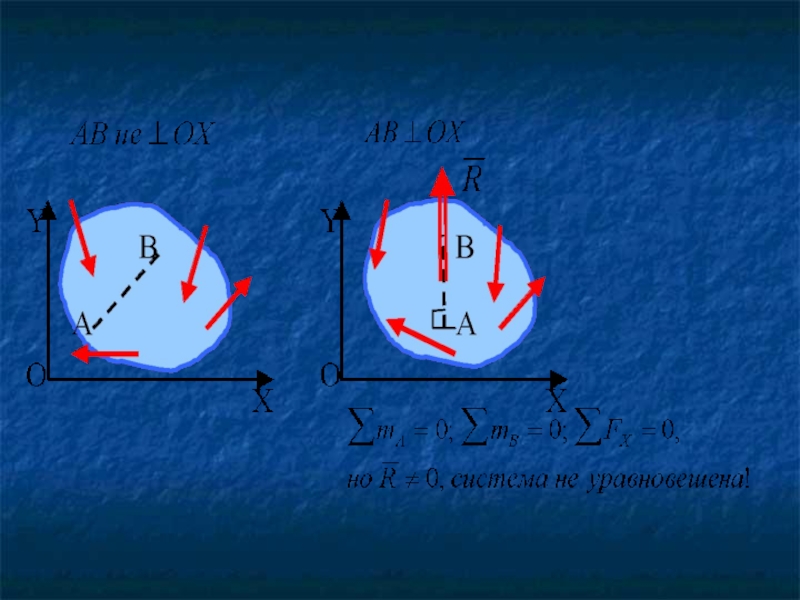
Слайд 15Вторая форма условий равновесия:
Для равновесия произвольной плоской системы сил необходимо и

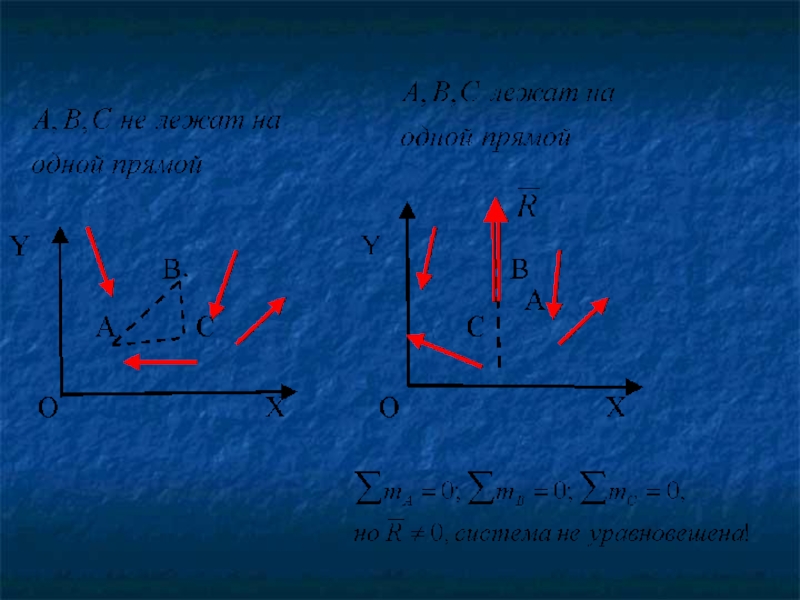
Слайд 17Третья форма условий равновесия
Для равновесия произвольной плоской системы сил необходимо и

Слайд 19
Для проверки решения задачи
на равновесие плоской системы сил составляют

Слайд 20РАВНОВЕСИЕ ПЛОСКОЙ СИСТЕМЫ ПАРАЛЛЕЛЬНЫХ СИЛ
Пусть все силы лежат в плоскости О1XY.

Слайд 21Из условия
следуют две формы аналитических условий равновесия
плоской системы параллельных сил.
Расположим ось О1Y параллельно силам тогда вектор перпендикулярен плоскости О1XY и его можно считать величиной алгебраической
Из условия
следуют две формы аналитических условий равновесия
плоской системы параллельных сил.

Слайд 22Основная форма условий равновесия
Для равновесия плоской системы параллельных сил необходимо

Слайд 23Вторая форма условий равновесия:
Для равновесия плоской системы параллельных сил необходимо


Слайд 25РАСПРЕДЕЛЕННЫЕ НАГРУЗКИ
равномерно распределенная вдоль прямой нагрузка. Это система параллельных сил,
При статических расчетах эту систему параллельных сил заменяют равнодействующей , приложенной в середине отрезка АВ, ее модуль равен Q = q×a.

Слайд 26
Неравномерно распределенная нагрузка.
Параллельные силы увеличиваются от нуля до qmax по
Линия действия равнодействующей силы проходит через центр тяжести треугольника, т. е. на расстоянии a/3 от точки В.

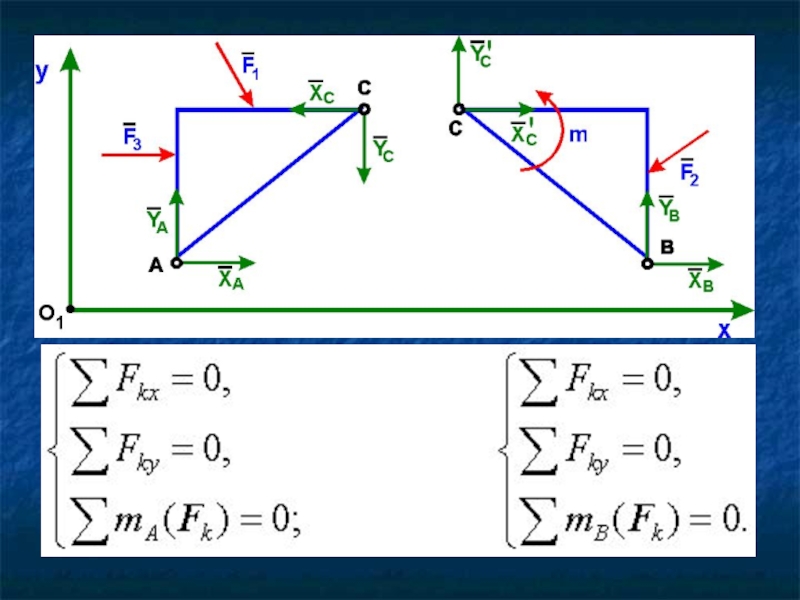
Слайд 27РАВНОВЕСИЕ СИСТЕМЫ ТЕЛ
Связи между частями конструкции называются внутренними (шарнир С),
скрепляющие конструкцию с другими телами, - внешними (шарниры А и В).
, скрепляющие конструкцию с другими")
Слайд 28Для определения внутренних и внешних реакций связей трех шарнирной арки расчленим
Для определения внутренних и внешних реакций связей трех шарнирной арки расчленим конструкцию по соединительному шарниру С на две части и рассмотрим равновесие каждой из частей в отдельности.

Слайд 29
При действии на трех шарнирную арку заданной произвольной плоской системы сил

Слайд 30Статически определимые системы тел
Системы тел (тело), для которых число неизвестных реакций
, для которых число неизвестных реакций связей равно числу уравнений")