- Главная
- Разное
- Дизайн
- Бизнес и предпринимательство
- Аналитика
- Образование
- Развлечения
- Красота и здоровье
- Финансы
- Государство
- Путешествия
- Спорт
- Недвижимость
- Армия
- Графика
- Культурология
- Еда и кулинария
- Лингвистика
- Английский язык
- Астрономия
- Алгебра
- Биология
- География
- Детские презентации
- Информатика
- История
- Литература
- Маркетинг
- Математика
- Медицина
- Менеджмент
- Музыка
- МХК
- Немецкий язык
- ОБЖ
- Обществознание
- Окружающий мир
- Педагогика
- Русский язык
- Технология
- Физика
- Философия
- Химия
- Шаблоны, картинки для презентаций
- Экология
- Экономика
- Юриспруденция
Понятие динамической системы станка. Динамическое качество станка. Основные задачи динамики станков презентация
Содержание
- 1. Понятие динамической системы станка. Динамическое качество станка. Основные задачи динамики станков
- 2. Рис. 1 Схема замкнутой динамической системы станка
- 3. Рис.3 Колебания по нормали к поверхности резания
- 4. Лекция № 2. Статические и динамические
- 5. где [M], [C], [K] – матрицы масс,
- 6. Рис. 6 Амплитудно-фазовая частотная характеристика (АФЧХ) где
- 7. Рис. 7 Последовательное соединение звеньев а) б) Рис. 8 Параллельное соединение звеньев
- 8. x1(ω) = x(ω) + y2(ω)
- 9. Рис. 11 Передаточные функции динамической системы Рис. 12 Механическая система
- 10. Рис. 13 Эквивалентные упругие системы а) б)
- 11. Лекция № 3. Упругая система станка
- 12. , [ мм/Н] ,
- 13. р=сδ m, где δ –
- 14. Рис. 17 Случай работы стыка с частичным раскрыванием (δ0
- 15. Лекция № 4. Координатные связи Системы
- 16. Рис. 19
- 17. Рис. 20 Эпюры распределения скоростей и
- 18. Рис. 22 Простейшая динамическая система
- 20. Рис. 25 Вид АФЧХ системы с
- 21. , где
- 22. Процесс резания Рис. 28 Вид стружки
- 23. Устойчивость перемещения узлов станка
- 24. Устойчивость динамической системы станка при резании.
Слайд 1Динамика станков
(лекции)
Молодцов В.В.
Лекция № 1.
Понятие динамической системы станка.
Динамическое качество станка
Основные задачи динамики станков.
Статические и динамические характеристики элементов и систем.
Передаточная функция динамической системы станка.
Молодцов В.В.Лекция № 1. Понятие динамической системы станка.Динамическое качество станка Основные задачи динамики")
Слайд 2Рис. 1 Схема замкнутой динамической системы станка
а)
б)
Рис. 2 Область неустойчивости при
растачивании
z1(t)
z2(t)
z3(t)
y3(t)
y2(t)
y1(t)
б)Рис. 2 Область неустойчивости при растачиванииz1(t)z2(t)z3(t) y3(t)y2(t)y1(t)")
Слайд 3Рис.3 Колебания по нормали к поверхности резания в переходном процессе при
врезании резца
- логарифмический декремент затухания

Слайд 4Лекция № 2.
Статические и динамические характеристики элементов и систем.
Передаточная
функция динамической системы станка.
Виды соединения элементов.
Эквивалентные ДС станка
Виды соединения элементов.
Эквивалентные ДС станка
Рис. 4 Замкнутая (а), разомкнутая (б) динамические системы и динамические системы элементов (в) и (г)
а)
б)
в)
г)

Слайд 5где [M], [C], [K] – матрицы масс, демпфирования и жесткости с
постоянными коэффициентами
{y}=[y1(t), …, yn(t)]T – вектор выходных сигналов
{f(t)}=[f1(t), …, fr(t)]T – вектор внешних воздействий
{y}=[y1(t), …, yn(t)]T – вектор выходных сигналов
{f(t)}=[f1(t), …, fr(t)]T – вектор внешних воздействий
– передаточная функция
Рис. 5 Входной и выходной синусоидальные сигналы
Рис. 6 Амплитудная и фазовая частотные характеристики (АЧХ и ФЧХ)
, …, yn(t)]T")
Слайд 6Рис. 6 Амплитудно-фазовая частотная характеристика (АФЧХ)
где Re(ω) – вещественная часть, а
Im(ω) – мнимая часть
где Re(ω) – вещественная часть, а Im(ω) – мнимая часть")
б)Рис. 8 Параллельное соединение звеньев")
Слайд 8x1(ω) = x(ω) + y2(ω)
Рис. 10 Отрицательная обратная связь.
Рис. 9
Положительная обратная связь.
 = x(ω) + y2(ω) Рис. 10 Отрицательная обратная связь.Рис. 9 Положительная обратная связь.")

б)")
Слайд 11Лекция № 3.
Упругая система станка
Динамическая податливость
Линеаризация
[мм/Н], [мкм/Н]
, где eэус и
kэус – податливость
и жесткость системы
и жесткость системы
,
где р=iω; eyc=1/k – приведенная податливость системы (мм/Н или мкм/Н);
– инерционная постоянная времени (сек);
– постоянная времени демпфирования (сек);
λ – логарифмический декремент;
ωс=2π fс – собственная круговая частота колебаний;
fс – собственная частота колебаний (Гц).

Слайд 12
, [ мм/Н]
, [рад]
Рис. 14 Амплитудно-фазовая частотная характеристикасистемы с одной степенью
свободы характеристика (АФЧХ)
Рис. 15 Амплитудная и фазовая частотные характеристики системы с одной степенью свободы характеристика (АФЧХ)
Рис. 15")
Слайд 13
р=сδ m, где δ – контактное перемещение, р – давление,
с и m – коэффициент и показатель степени
Линеаризация
справедливо при р<<р0
Рис. 16 Случай нагружения плоского стыка двух абсолютно жестких деталей центрально приложенной сосредоточенной силой Р и моментом М

Слайд 14
Рис. 17 Случай работы стыка с частичным раскрыванием (δ0
u – безразмерная неотрицательная переменная
При

Слайд 15Лекция № 4.
Координатные связи
Системы со скоростной связью
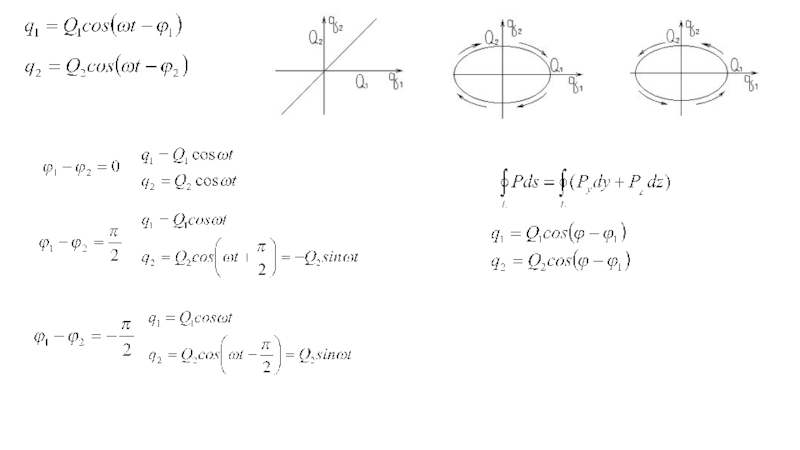
Рис. 18 Эллипс жесткости
суппортной группы
P – внешняя сила
δ – перемещение инструмента в результате действия силы P;
kmin и kmax – оси минимальной и максимальной жесткости;
α – угол между осью Z и осью максимальной жесткости;
β – угол между направлением действия силы и осью максимальной жесткости;
γ – угол между направлением перемещения и осью максимальной жесткости.
γ > α
При γ < α tg γ < tg α

Слайд 16
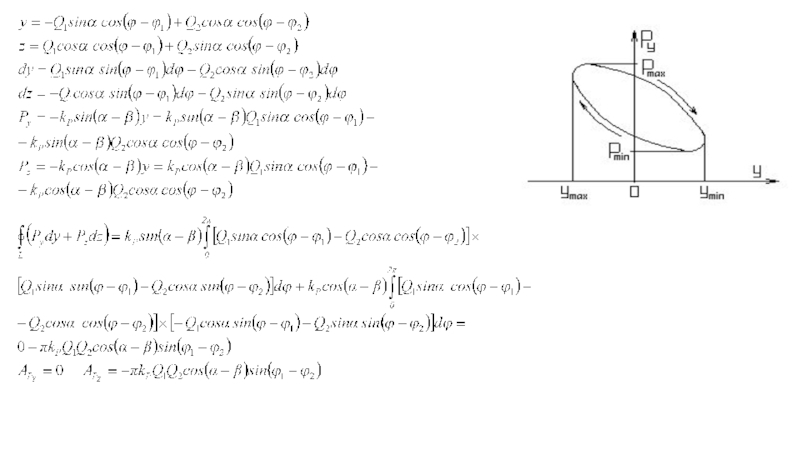
Рис. 19 Модель УС суппорта
где m1 и m2 – приведенные массы
системы,
c1 и c2 – коэффициенты сил демпфирования,
k1=kmax и k2=kmin – главные жесткости системы
c1 и c2 – коэффициенты сил демпфирования,
k1=kmax и k2=kmin – главные жесткости системы

Слайд 17
Рис. 20 Эпюры распределения скоростей и давления в сечениях клинового зазора,
заполненного маслом
Рис. 21 Силы действующие на бесконечно малый объем жидкости b·dx·dy
(1)
(2)
(3)
При y=0 Vs(y)=V c2=V
При y=h(x) Vs(y)=0
(4)
При
, где hp – высота щели в месте
максимума давления
Лекция № 5.
Системы со скоростной связью

Слайд 18
Рис. 22 Простейшая динамическая система со скоростной связью
, где
ТВ = Т2ꞌ – постоянная времени всплывания
Рис. 23 Вид АФЧХ системы со скоростной связью
Системы со скоростной связью

Слайд 19
(1)
(2)
Рис. 22 Простейшая динамическая система с инерционной связью
, где
Лекция №
6.
Инерционная связь
Рабочие процессы
Процесс трения
Инерционная связь
Рабочие процессы
Процесс трения
(2)Рис. 22 Простейшая динамическая система с инерционной связью , гдеЛекция № 6. Инерционная связьРабочие процессыПроцесс")
Слайд 20
Рис. 25 Вид АФЧХ системы с инерционной связью
Процесс трения
, где
,
где
Рис. 26 Кривая Штрибека
, где V >Vкр

Слайд 21
, где
βст
Рис. 27 Геометрический смысл постоянной β
Практическое воздействие на
процесс трения осуществляется следующими путями:
Подбором материалов трущихся тел;
Введением новых видов смазки;
Изменением геометрии профилей контактирующих поверхностей;
Изменением нормальной нагрузки к поверхности.
Подбором материалов трущихся тел;
Введением новых видов смазки;
Изменением геометрии профилей контактирующих поверхностей;
Изменением нормальной нагрузки к поверхности.
Лекция № 7.
Процесс резания
Устойчивость перемещения узлов станка
Устойчивость динамической системы станка при резании

Слайд 22Процесс резания
Рис. 28 Вид стружки и колебания силы резания: а) -
при образовании стружки надлома; б) - при формировании периодически срывающегося нароста
а)
б)
Рис. 29 Усадка стружки
Рис. 30 АФЧХ процесса резания
 - при образовании стружки надлома;")

Слайд 24
Устойчивость динамической системы станка при резании.
– динамическая составляющая
силы резания