(1.2.1)
(1.2.2)
(1.2.1)
(1.2.2)
")

орбитальная
угловая скорость
круговой орбиты
Проекции вектора

Из (1.4.1) получаем значения производных углов по времени
(1.4.3)
 (1.4.2) Выражения (1.4.2) позволяют выполнить интегрирование уравнений")
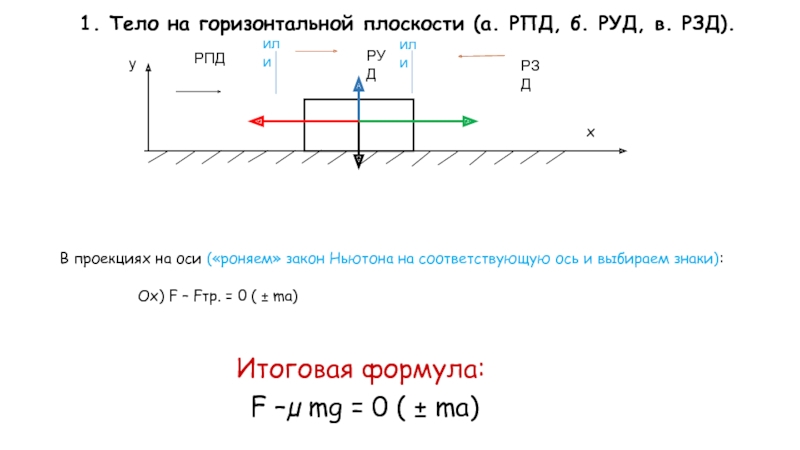
Уравнения
движения:
(1.5.1)
(1.5.2)
(1.5.3)
 (1.5.2) (1.5.3)")
- Вентиляционный момент,
- гироскопические моменты.
1.6.2. Моменты реактивных сил
- тяга реактивного двигателя ОДУ,
- эксцентриситет вектора тяги

1.6.4. Момент сил солнечного давления:

– индукция магнитного поля Земли;
– постоянный магнитный момент;
– наведенный магнитный момент
- Дипольная модель магнитного поля Земли:
(1.6.5-1)
(1.6.5-2)
- Модуль вектора В:

при h = 0;
u – аргумент широты;
i – угол наклона плоскости орбиты к плоскости
геомагнитного экватора;
 – индукция МПЗ на высоте")
1.7.2. Элементарные силы гравитации в проекциях на орбитальные оси
(1.7.1-2)
 Центр тяжести смещён относительно центра масс1.7.2. Элементарные силы гравитации в")
(1.8.1-1)
(1.8.1-2)

1.8.2. Гравитационные моменты относительно связанных осей
(1.8.2-1)
(1.8.2-2)
: 1.8.2. Гравитационные моменты")
- Гравитационные моменты при движении в плоскости курса и произвольном тензоре инерции
- Гравитационные моменты при движении в плоскости крена и произвольном тензоре инерции
(1.8.2-5)
(1.8.2-4)
(1.8.2-3)

(1.8.2-6)
(1.8.2-7)

- Связанные оси повёрнуты в плоскости тангажа:
- Связанные оси повёрнуты в плоскости курса:
(1.9.1-1)
(1.9.1-2)
(1.9.1-3)

Гироскопические моменты при плоских отклонениях и при диагональном тензоре инерции:
(1.9.1-4)

Уравнения движения:
Исключаем время:
Интеграл энергии:
Уравнение фазовой траектории:

Фазовый портрет движений в случае диагонального тензора инерции

В точке равновесия :
Следовательно, в точке равновесия:

- Сепаратриса
- Область колебательных движений
- Область ротационных движений

Критический случай: область колебательных движений исчезла – возможны только ротационные движения.
 тело переходит в ротацию.Критический случай: область")
Для того, чтобы управлять ориентацией тела захваченного гравитационном градиентом, необходимо располагать управляющим моментом, который по модулю больше суммы максимального гравитационного и максимального гироскопического моментов:
Условие захвата можно сформулировать как требование достаточной малости полной механической энергии тела в движении относительно местной вертикали:
Для захвата градиентом гравитации, необходимо погасить избыток кинетической энергии тела.
Если выполнены условия захвата градиентом гравитации, тело приобретает в движении по тангажу
постоянную составляющую угловой скорости, равную угловой скорости орбитального движения
При этом возникают гироскопические моменты по курсу и по крену, притягивающие ось максимального момента инерции к бинормали.

1.11.1. В плоскости тангажа свободные колебания (либрация) при условии :
Тело совершает незатухающие колебания,
период которых соизмерим с периодом орбитального движения.

Случай плоского движения по тангажу в окрестности точки С1
Относительно местной вертикали колеблется ось минимального момента инерции. Центральная")
Относительно местной вертикали колеблется ось минимального момента инерции, а центральные строительные (связанные) оси колеблются со смещением
Это смещение - статическая ошибка , обусловленная действием постоянного момента МZ
Центробежные моменты инерции ( произведения инерции) оказывают практически такое же воздействие на тело, как и постоянный момент.



1.11. Гравитационные системы стабилизации КЛА
Один из вариантов конструкции КЛА с гравитационной системой стабилизации
Разворачиваемые
штанги и спираль с демпфирующим покрытием
1.11.1. Конструктивные схемы систем одноосной гравитационной стабилизации

1.11.2. Конструктивные схемы систем гравитационной стабилизации по трём осям

Задача 1 решается системой предварительного успокоения. Она может быть как активной (использовать датчики, исполнительные органы, энергию или топливо) , так и пассивной, например на основе магнитно- гистерезисных стержней. При этом за каждый оборот в магнитном поле Земли от кинетической энергии отнимается её часть и выделяется в виде тепла. Она затрачивается на перемагничивание стержней:
Задача 2 решается системой специальных демпферов. Используются конструкции, в которых отдельные шарнирно или упруго закреплённые части, перемещаясь друг относительно друга в вязкой жидкости, энергию колебаний корпуса переводят в тепло и рассеивают.

Покажем, что в свободном вращении всякое твёрдое тело при избытке энергии движения возбуждено, стремится сбросить этот избыток энергии и прийти к состоянию относительного покоя – равномерного вращения вокруг прямой, совпадающей с направлением вектора кинетического момента.

1.12.4. Характер и параметры движения:

1.12.4. Силовые поля в прецессирующем теле:
1.12.4. Прецессия как следствие избытка энергии вращения

1.13.1. Система динамических уравнений с возмущением и их решения


- Крутящий момент от электродвигателя,
- Коэффициент вентиляционного момента вращающихся масс (маховика).
1.14.1. Маховик с постоянной скоростью
- Момент инерции и
угловая скорость маховика
Гироскопические моменты от маховика
,- Крутящий момент")
Уравнения движения в предположении,
что на тело действуют только эти моменты:
В окрестности устойчивого положения равновесия:



Бифуркации структуры фазовой поверхности
 Параметр")
при α = δ = ε;
при α = δ = ε/2.
S3467 :
S6789:
Полибифуркации структур

Гр
Г2
Г1

Если не удалось найти и скачать презентацию, Вы можете заказать его на нашем сайте. Мы постараемся найти нужный Вам материал и отправим по электронной почте. Не стесняйтесь обращаться к нам, если у вас возникли вопросы или пожелания:
Email: Нажмите что бы посмотреть
Это сайт презентаций, докладов, проектов, шаблонов в формате PowerPoint. Мы помогаем школьникам, студентам, учителям, преподавателям хранить и обмениваться учебными материалами с другими пользователями.
")

")








 фазовой поверхности")




Общий вид")



 в системе с неустойчивой структурой Li")


 устойчива. Ротационный переходный процесс")
 устойчива. Переходный процесс смешанного типа")