- Главная
- Разное
- Дизайн
- Бизнес и предпринимательство
- Аналитика
- Образование
- Развлечения
- Красота и здоровье
- Финансы
- Государство
- Путешествия
- Спорт
- Недвижимость
- Армия
- Графика
- Культурология
- Еда и кулинария
- Лингвистика
- Английский язык
- Астрономия
- Алгебра
- Биология
- География
- Детские презентации
- Информатика
- История
- Литература
- Маркетинг
- Математика
- Медицина
- Менеджмент
- Музыка
- МХК
- Немецкий язык
- ОБЖ
- Обществознание
- Окружающий мир
- Педагогика
- Русский язык
- Технология
- Физика
- Философия
- Химия
- Шаблоны, картинки для презентаций
- Экология
- Экономика
- Юриспруденция
Экзамен по дисциплинам Электропривод презентация
Содержание
- 1. Экзамен по дисциплинам Электропривод
- 2. ЛИТЕРАТУРА
- 3. Литература по электроприводу 1. Чиликин М.Г. Общий
- 4. Вопросы к экзамену 1. Определение понятия «Электропривод».
- 5. ВОПРОСЫ К ЭКЗАМЕНУ 6. Кинематические и
- 6. Вопросы к экзамену 11. Замкнутая система ЭП
- 7. Вопросы к экзамену 16. Преобразователи частоты для
- 8. Вопросы к экзамену 21. Пути повышения экономичности
- 9. Вопросы к экзамену 26. Выбор типа и
- 10. Вопросы к экзамену 32. Особенности электроприводов кормоприготовительных
- 11. ЭЛЕКТРОПРИВОД Определение понятия «Электропривод». Структурная схема электропривода.
- 12. Классификация электроприводов Электропривод (ЭП) бывает групповой, индивидуальный
- 13. Структурная схема электропривода. 1 – электродвигатель; 2
- 14. Классификация ЭП По характеру движения электроприводы
- 15. Классификация ЭП По роду тока ЭП разделяются
- 16. Классификация ЭП По выполняемым функциям электроприводы
- 17. Преимущества ЭП По сравнению с другими видами
- 18. Механические характеристики рабочих машины
- 19. Механические характеристики рабочих машин Если
- 20. Механические характеристики рабочих машин При х=1 получается
- 21. Механические характеристики рабочих машин Если х=2, то
- 22. Механические характеристики рабочих машин Если х =
- 24. Механические и электромеханические характеристики электродвигателей. Жесткость механических
- 25. Механические и электромеханические характеристики электродвигателей. Жесткость механических
- 26. МЕХАНИЧЕСКИЕ ХАРАКТЕРИСТИКИ ЭЛЕКТРОДВИГАТЕЛЕЙ
- 28. КИНЕМАТИЧЕСКИЕ И РАСЧЕТНЫЕ СХЕМЫ ЭЛЕКТРОПРИВОДА. ОПРЕДЕЛЕНИЕ ПРИВЕДЕННЫХ МОМЕНТОВ СОПРОТИВЛЕНИЯ И ИНЕРЦИИ
- 29. КИНЕМАТИЧЕСКИЕ И РАСЧЕТНЫЕ СХЕМЫ ЭЛЕКТРОПРИВОДА. ОПРЕДЕЛЕНИЕ ПРИВЕДЕННЫХ МОМЕНТОВ СОПРОТИВЛЕНИЯ И ИНЕРЦИИ
- 30. КИНЕМАТИЧЕСКИЕ И РАСЧЕТНЫЕ СХЕМЫ ЭЛЕКТРОПРИВОДА. ОПРЕДЕЛЕНИЕ ПРИВЕДЕННЫХ МОМЕНТОВ СОПРОТИВЛЕНИЯ И ИНЕРЦИИ
- 31. КИНЕМАТИЧЕСКИЕ И РАСЧЕТНЫЕ СХЕМЫ ЭЛЕКТРОПРИВОДА. ОПРЕДЕЛЕНИЕ ПРИВЕДЕННЫХ МОМЕНТОВ СОПРОТИВЛЕНИЯ И ИНЕРЦИИ
- 32. КИНЕМАТИЧЕСКИЕ И РАСЧЕТНЫЕ СХЕМЫ ЭЛЕКТРОПРИВОДА. ОПРЕДЕЛЕНИЕ ПРИВЕДЕННЫХ МОМЕНТОВ СОПРОТИВЛЕНИЯ И ИНЕРЦИИ
- 33. КИНЕМАТИЧЕСКИЕ И РАСЧЕТНЫЕ СХЕМЫ ЭЛЕКТРОПРИВОДА. ОПРЕДЕЛЕНИЕ ПРИВЕДЕННЫХ МОМЕНТОВ СОПРОТИВЛЕНИЯ И ИНЕРЦИИ
- 34. КИНЕМАТИЧЕСКИЕ И РАСЧЕТНЫЕ СХЕМЫ ЭЛЕКТРОПРИВОДА. ОПРЕДЕЛЕНИЕ ПРИВЕДЕННЫХ МОМЕНТОВ СОПРОТИВЛЕНИЯ И ИНЕРЦИИ
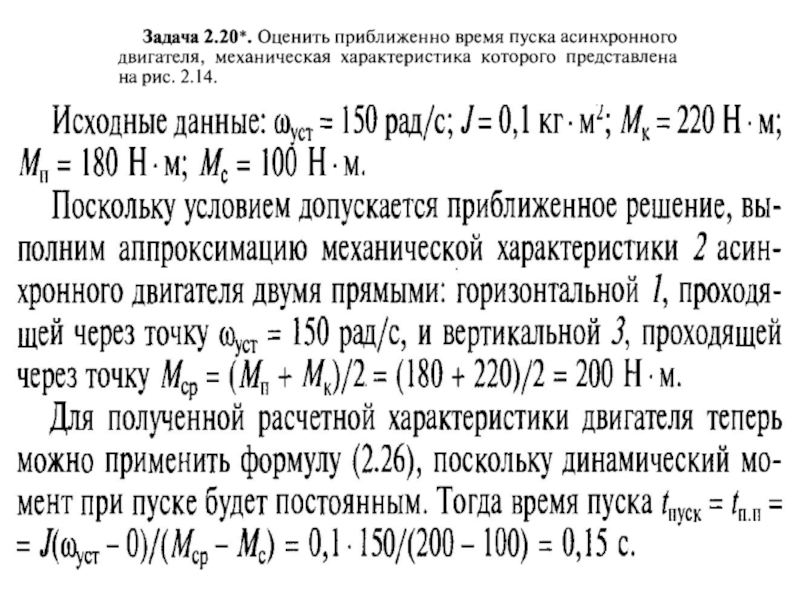
- 35. ОПРЕДЕЛЕНИЕ ВРЕМЕНИ РАЗБЕГА И ТОРМОЖЕНИЯ ЭЛЕКТРОПРИВОДА
- 36. ОПРЕДЕЛЕНИЕ ВРЕМЕНИ РАЗБЕГА И ТОРМОЖЕНИЯ ЭЛЕКТРОПРИВОДА
- 39. МЕХАНИЧЕСКАЯ И ЭЛЕКТРОМЕХАНИЧЕСКАЯ ХАРАКТЕРИСТИКИ АД
- 40. МЕХАНИЧЕСКАЯ И ЭЛЕКТРОМЕХАНИЧЕСКАЯ ХАРАКТЕРИСТИКИ АД
- 41. МЕХАНИЧЕСКАЯ И ЭЛЕКТРОМЕХАНИЧЕСКАЯ ХАРАКТЕРИСТИКИ АД
- 42. МЕХАНИЧЕСКАЯ И ЭЛЕКТРОМЕХАНИЧЕСКАЯ ХАРАКТЕРИСТИКИ АД
- 43. МЕХАНИЧЕСКАЯ И ЭЛЕКТРОМЕХАНИЧЕСКАЯ ХАРАКТЕРИСТИКИ АД
- 44. МЕХАНИЧЕСКАЯ И ЭЛЕКТРОМЕХАНИЧЕСКАЯ ХАРАКТЕРИСТИКИ АД
- 45. Номинальный и пусковой ток АД
- 46. Перегрузочная способность АД. Снижение пускового тока АД
- 47. Снижение пусковых токов АД
- 48. ПУСК АД
- 49. ОСНОВНЫЕ ЭНЕРГЕТИЧЕСКИЕ РЕЖИМЫ АД
- 50. ОСНОВНЫЕ ЭНЕРГЕТИЧЕСКИЕ РЕЖИМЫ АД
- 51. Тормозные режимы асинхронного электродвигателя
- 52. Динамическое торможение АД
- 53. Динамическое торможение АД
- 54. Расчет и построение механической характеристики АД по паспортным данным
- 55. Расчет и построение механической характеристики АД по паспортным данным
- 56. Расчет и построение механической характеристики АД по паспортным данным
- 57. ПРИМЕР РАСЧЕТА МЕХАНИЧЕСКОЙ ХАРАКТЕРИСТИКИ АД
- 58. ПРИМЕР РАСЧЕТА МЕХАНИЧЕСКОЙ ХАРАКТЕРИСТИКИ АД
- 59. ПРИМЕР РАСЧЕТА МЕХАНИЧЕСКОЙ ХАРАКТЕРИСТИКИ АД
- 60. РАСЧЕТ ЭЛЕКТРОМЕХАНИЧЕСКОЙ И МЕХАНИЧЕСКОЙ ХАРАКТЕРИСТИК АД ПО ПАСПОРТНЫМ ДАННЫМ
- 61. РАСЧЕТ ЭЛЕКТРОМЕХАНИЧЕСКОЙ И МЕХАНИЧЕСКОЙ ХАРАКТЕРИСТИК АД ПО ПАСПОРТНЫМ ДАННЫМ
- 62. ЭЛЕКТРОМЕХАНИЧЕСКАЯ ХАРАКТЕРИСТИКА АД
- 63. ПРИМЕР ПОСТРОЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ И МЕХАНИЧЕСКОЙ ХАРАКТЕРИСТИК АД
- 64. ПРИМЕР ПОСТРОЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ И МЕХАНИЧЕСКОЙ ХАРАКТЕРИСТИК АД
- 65. ПРИМЕР ПОСТРОЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ И МЕХАНИЧЕСКОЙ ХАРАКТЕРИСТИК АД
- 66. ПРИМЕР ПОСТРОЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ И МЕХАНИЧЕСКОЙ ХАРАКТЕРИСТИК АД
- 67. ПРИМЕР ПОСТРОЕНИЯ ЭЛЕКТРОМЕХАНИЧЕСКОЙ И МЕХАНИЧЕСКОЙ ХАРАКТЕРИСТИК АД
- 68. ЭНЕРГЕТИКА ЭЛЕКТРОПРИВОДА.
- 69. ПОТЕРИ МОЩНОСТИ В ЭЛЕКТРОПРИВОДЕ
- 70. ПОТЕРИ МОЩНОСТИ В ЭЛЕКТРОПРИВОДЕ
- 71. ПОТЕРИ МОЩНОСТИ В ЭЛЕКТРОПРИВОДЕ
- 72. ЭНЕРГЕТИКА ЭЛЕКТРОПРИВОДА. КОЭФФИЦИЕНТ МОЩНОСТИ ЭП
- 73. КОЭФФИЦИЕНТ МОЩНОСТИ ЭП
- 74. КОЭФФИЦИЕНТ МОЩНОСТИ ЭП
- 75. КОЭФФИЦИЕНТ МОЩНОСТИ ЭП
- 78. ЭНЕРГЕТИКА ЭЛЕКТРОПРИВОДА. ПУТИ ЭКОНОМИИ ЭНЕРГИИ В ЭП
- 79. РЕГУЛИРОВАНИЕ КООРДИНАТ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ (регулирование скорости)
- 80. РЕГУЛИРОВАНИЕ КООРДИНАТ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ (регулирование скорости)
- 81. РЕГУЛИРОВАНИЕ КООРДИНАТ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ (регулирование скорости)
- 82. РЕГУЛИРОВАНИЕ КООРДИНАТ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ (регулирование скорости)
- 83. РЕГУЛИРОВАНИЕ КООРДИНАТ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ (регулирование скорости)
- 84. РЕГУЛИРОВАНИЕ КООРДИНАТ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ (регулирование скорости)
- 85. РЕГУЛИРОВАНИЕ КООРДИНАТ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ (регулирование скорости)
- 86. РЕГУЛИРОВАНИЕ КООРДИНАТ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ (регулирование скорости)
- 87. РЕГУЛИРОВАНИЕ КООРДИНАТ АСИНХРОННОГО ЭЛЕКТРОДВИГАТЕЛЯ (регулирование скорости)
- 88. Регулирование скорости АД. Принцип частотного регулирования скорости.
- 89. Регулирование скорости АД. Принцип частотного регулирования скорости.
- 90. Преобразователи частоты для регулируемого электропривода
- 91. Преобразователи частоты для регулируемого электропривода
- 92. Преобразователи частоты для регулируемого электропривода
- 93. Преобразователи частоты для регулируемого электропривода
- 94. Преобразователи частоты для регулируемого электропривода
- 96. Преобразователи частоты для регулируемого электропривода
- 97. Преобразователи частоты для регулируемого электропривода
- 98. Преобразователи частоты для регулируемого электропривода
- 99. Преобразователи частоты для регулируемого электропривода
- 100. Преобразователи частоты для регулируемого электропривода
- 101. ВЫБОР ЭЛЕКТРОДВИГАТЕЛЕЙ ПО МОЩНОСТИ С УЧЕТОМ РЕЖИМА ИХ РАБОТЫ
- 102. ВЫБОР ЭЛЕКТРОДВИГАТЕЛЕЙ ПО МОЩНОСТИ С УЧЕТОМ РЕЖИМА ИХ РАБОТЫ
- 103. ВЫБОР ЭЛЕКТРОДВИГАТЕЛЕЙ ПО МОЩНОСТИ С УЧЕТОМ РЕЖИМА ИХ РАБОТЫ
- 104. ВЫБОР ЭЛЕКТРОДВИГАТЕЛЕЙ ПО МОЩНОСТИ С УЧЕТОМ РЕЖИМА ИХ РАБОТЫ
- 105. ВЫБОР ЭЛЕКТРОДВИГАТЕЛЕЙ ПО МОЩНОСТИ С УЧЕТОМ РЕЖИМА ИХ РАБОТЫ
- 106. ВЫБОР ЭЛЕКТРОДВИГАТЕЛЕЙ ПО МОЩНОСТИ С УЧЕТОМ РЕЖИМА ИХ РАБОТЫ
- 107. ВЫБОР ЭЛЕКТРОДВИГАТЕЛЕЙ ПО МОЩНОСТИ С УЧЕТОМ РЕЖИМА ИХ РАБОТЫ
- 108. ВЫБОР ЭЛЕКТРОДВИГАТЕЛЕЙ ПО МОЩНОСТИ С УЧЕТОМ РЕЖИМА ИХ РАБОТЫ
- 109. ВЫБОР ЭЛЕКТРОДВИГАТЕЛЕЙ ПО МОЩНОСТИ С УЧЕТОМ РЕЖИМА ИХ РАБОТЫ
- 110. ВЫБОР ЭЛЕКТРОДВИГАТЕЛЕЙ ПО МОЩНОСТИ С УЧЕТОМ РЕЖИМА ИХ РАБОТЫ
- 111. ВЫБОР ЭЛЕКТРОДВИГАТЕЛЕЙ ПО МОЩНОСТИ С УЧЕТОМ РЕЖИМА ИХ РАБОТЫ
- 112. ВЫБОР ЭЛЕКТРОДВИГАТЕЛЕЙ ПО МОЩНОСТИ С УЧЕТОМ РЕЖИМА ИХ РАБОТЫ
- 113. ВЫБОР ЭЛЕКТРОДВИГАТЕЛЕЙ ПО МОЩНОСТИ С УЧЕТОМ РЕЖИМА ИХ РАБОТЫ
- 114. ВЫБОР ЭЛЕКТРОДВИГАТЕЛЕЙ ПО МОЩНОСТИ С УЧЕТОМ РЕЖИМА ИХ РАБОТЫ
- 115. ВЫБОР ЭЛЕКТРОДВИГАТЕЛЕЙ ПО МОЩНОСТИ С УЧЕТОМ РЕЖИМА ИХ РАБОТЫ МЕТОД СРЕДНИХ ПОТЕРЬ
- 116. ВЫБОР ЭЛЕКТРОДВИГАТЕЛЕЙ ПО МОЩНОСТИ С УЧЕТОМ РЕЖИМА ИХ РАБОТЫ
- 117. ВЫБОР ЭЛЕКТРОДВИГАТЕЛЕЙ ПО МОЩНОСТИ С УЧЕТОМ РЕЖИМА ИХ РАБОТЫ
- 118. ВЫБОР ЭЛЕКТРОДВИГАТЕЛЕЙ ПО МОЩНОСТИ С УЧЕТОМ РЕЖИМА ИХ РАБОТЫ


Слайд 3Литература по электроприводу
1. Чиликин М.Г. Общий курс электропривода: учеб. пособие/ М.Г.
Чиликин А.С., Сандлер- Москва: Энергоиздат, 1981. - 576 с.
2. Москаленко В.В. Электрический привод: Учебник для электротехн. спец. / В. В. Москаленко. - Москва : Высш. шк., 1991. - 430с.
3. Дайнеко, В.А. Электрооборудование сельскохозяйственнных предприятий / В.А. Дайнеко, А.И. Ковалинский. - Минск : Новое знание, 2008. - 314 с.
4. Фоменков А.П. Электропривод сельскохозяйственных машин, агрегатов и поточных линий: учебник для высш. учеб. заведений/ А.П. Фоменков.- Москва: Колос, 1984.-288с.
5. Москаленко В.В. Автоматизированный электропривод: Учебник для электротехн. спец. / В. В. Москаленко. - Москва: Энргоатомиздат, 1986.-416 с.
6. Ильинский И.Ф. Общий курс электропривода: учебник для вузов / И. Ф. Ильинский, В. Ф. Козаченко. - М.: Энергоатомиздат, 1992. - 544с
7. ЭЛЕКТРОПРИВОД. Часть 1. Проектирование нерегулируемого электропривода рабочей машины . Гурин В.В., Бабаева Е.В. БГАТУ, 2006 г.
8. ГОСТ 16593-79. Электроприводы. Термины и определения. -Москва: Издательство стандартов, 1980- 80 с.
2. Москаленко В.В. Электрический привод: Учебник для электротехн. спец. / В. В. Москаленко. - Москва : Высш. шк., 1991. - 430с.
3. Дайнеко, В.А. Электрооборудование сельскохозяйственнных предприятий / В.А. Дайнеко, А.И. Ковалинский. - Минск : Новое знание, 2008. - 314 с.
4. Фоменков А.П. Электропривод сельскохозяйственных машин, агрегатов и поточных линий: учебник для высш. учеб. заведений/ А.П. Фоменков.- Москва: Колос, 1984.-288с.
5. Москаленко В.В. Автоматизированный электропривод: Учебник для электротехн. спец. / В. В. Москаленко. - Москва: Энргоатомиздат, 1986.-416 с.
6. Ильинский И.Ф. Общий курс электропривода: учебник для вузов / И. Ф. Ильинский, В. Ф. Козаченко. - М.: Энергоатомиздат, 1992. - 544с
7. ЭЛЕКТРОПРИВОД. Часть 1. Проектирование нерегулируемого электропривода рабочей машины . Гурин В.В., Бабаева Е.В. БГАТУ, 2006 г.
8. ГОСТ 16593-79. Электроприводы. Термины и определения. -Москва: Издательство стандартов, 1980- 80 с.

Слайд 4Вопросы к экзамену
1. Определение понятия «Электропривод». Структурная схема электропривода.
2. Классификация электроприводов.
Преимущества ЭП перед другими видами привода.
3. Механические характеристики рабочих машин.
4. Механические и электромеханические характеристики электродвигателей. Жесткость механических характеристик.
5. Расчет и построение механической характеристики асинхронного электродвигателя по паспортным данным.
3. Механические характеристики рабочих машин.
4. Механические и электромеханические характеристики электродвигателей. Жесткость механических характеристик.
5. Расчет и построение механической характеристики асинхронного электродвигателя по паспортным данным.

Слайд 5ВОПРОСЫ К ЭКЗАМЕНУ
6. Кинематические и расчетные схемы электропривода. Определение приведенных
моментов сопротивления и инерции.
7. Определение времени разбега и торможения электропривода с асинхронным электродвигателем.
8. Выбор электродвигателей по мощности с учетом режима их работы.
9. Энергетика электропривода. Регулирование координат асинхронного электродвигателя.
10. Автоматизированное управление электроприводом. Понятие разомкнутых и замкнутых систем электропривода.
7. Определение времени разбега и торможения электропривода с асинхронным электродвигателем.
8. Выбор электродвигателей по мощности с учетом режима их работы.
9. Энергетика электропривода. Регулирование координат асинхронного электродвигателя.
10. Автоматизированное управление электроприводом. Понятие разомкнутых и замкнутых систем электропривода.

Слайд 6Вопросы к экзамену
11. Замкнутая система ЭП с обратной связью по скорости.
12.
Способы пуска АД. Пуск и реверс АД.
13. Регулирование скорости АД.
14. Принцип частотного регулирования скорости АД.
15. Механические характеристики АД при частотном регулировании.
13. Регулирование скорости АД.
14. Принцип частотного регулирования скорости АД.
15. Механические характеристики АД при частотном регулировании.

Слайд 7Вопросы к экзамену
16. Преобразователи частоты для регулируемого электропривода.
Функциональная схема преобразователя
частоты со звеном постоянного тока.
17. Выбор электродвигателя по мощности для режима S1.
18. Выбор электродвигателя по мощности для режима S2.
19. Выбор электродвигателя по мощности для режима S3.
20. Надежность электроприводов. Коэффициентный метод расчета надежности ЭП
17. Выбор электродвигателя по мощности для режима S1.
18. Выбор электродвигателя по мощности для режима S2.
19. Выбор электродвигателя по мощности для режима S3.
20. Надежность электроприводов. Коэффициентный метод расчета надежности ЭП

Слайд 8Вопросы к экзамену
21. Пути повышения экономичности и надежности электроприводов сельскохозяйственных машин.
22.
Особенности работы электроприводов в условиях сельского хозяйства.
23. Приводные характеристики рабочих машин.
24. Электропривод с однофазным асинхронным электродвигателем.
25. Приводные характеристики электроприводов насосных установок.
23. Приводные характеристики рабочих машин.
24. Электропривод с однофазным асинхронным электродвигателем.
25. Приводные характеристики электроприводов насосных установок.

Слайд 9Вопросы к экзамену
26. Выбор типа и мощности электродвигателей водоснабжающих установок.
27. Регулирование
подачи насосных установок.
28. Приводные характеристики вентиляторов.
29. Регулирование подачи вентиляторов.
30. Выбор мощности электродвигателей для привода вентиляционных установок.
28. Приводные характеристики вентиляторов.
29. Регулирование подачи вентиляторов.
30. Выбор мощности электродвигателей для привода вентиляционных установок.

Слайд 10Вопросы к экзамену
32. Особенности электроприводов кормоприготовительных машин. Способы облегчения пуска электродвигателей
кормоприготовительных машин.
33. Приводные характеристики измельчителей кормов.
34. Нагрузочные диаграммы дробилок зерна. Определение мощности дробильных машин. Удельная мощность измельчения.
35. Управление электроприводами зерносушилок (электропривод теплогенераторов, выгрузных и загрузочных устройств)
36. Электропривод доильных установок и машин первичной обработки молока. Электропривод вакуумного насоса.
37. Электропривод холодильных машин.
38. Электропривод сепараторов молока
33. Приводные характеристики измельчителей кормов.
34. Нагрузочные диаграммы дробилок зерна. Определение мощности дробильных машин. Удельная мощность измельчения.
35. Управление электроприводами зерносушилок (электропривод теплогенераторов, выгрузных и загрузочных устройств)
36. Электропривод доильных установок и машин первичной обработки молока. Электропривод вакуумного насоса.
37. Электропривод холодильных машин.
38. Электропривод сепараторов молока

Слайд 11ЭЛЕКТРОПРИВОД
Определение понятия «Электропривод». Структурная схема электропривода. Классификация электроприводов.
Электроприводом называется электромеханическая система, состоящая из электродвигательного, преобразовательного, передаточного и управляющего устройств, предназначенная для приведения в движение рабочих органов машин и управления этим движением. (по ГОСТ 16593-79).

Слайд 12Классификация электроприводов
Электропривод (ЭП) бывает групповой, индивидуальный и взаимосвязанный.
В групповом
приводе один электродвигатель приводит в движение с помощью разветвленной передачи группу механизмов или группу рабочих органов одного механизма. Кинематическая схема такого привода оказывается громоздкой, а сам привод неэкономичен, поэтому находит ограниченное применение.
В индивидуальном приводе электродвигатель приводит в движение только один рабочий орган.
Кинематическая схема механизма с индивидуальным приводом существенно упрощается, повышается экономичность и снижается металлоемкость механизма. Электродвигатель может встраиваться непосредственно в механизм.
Взаимосвязанный привод обеспечивает работу одного механизма при помощи нескольких электродвигателей.
В индивидуальном приводе электродвигатель приводит в движение только один рабочий орган.
Кинематическая схема механизма с индивидуальным приводом существенно упрощается, повышается экономичность и снижается металлоемкость механизма. Электродвигатель может встраиваться непосредственно в механизм.
Взаимосвязанный привод обеспечивает работу одного механизма при помощи нескольких электродвигателей.
 бывает групповой, индивидуальный и взаимосвязанный. В групповом приводе один электродвигатель приводит в")
Слайд 13Структурная схема электропривода.
1 – электродвигатель; 2 – силовой преобразователь;
3
– источник электроэнергии; 4 – блок управления;
5 – система управления; 6 – электропривод;
7 – исполнительный орган; 8 – рабочая машина;
9 – передаточное устройство.
5 – система управления; 6 – электропривод;
7 – исполнительный орган; 8 – рабочая машина;
9 – передаточное устройство.

Слайд 14Классификация ЭП
По характеру движения электроприводы бывают вращательные и линейные; по
направлению вращения – реверсивные и нереверсивные.
По принципу действия электродвигательного устройства ЭП бывают: непрерывного действия (подвижные части ЭД в установившемся режиме находятся в состоянии непрерывного движения) и дискретного действия (подвижные части находятся в состоянии дискретного движения).
По принципу действия электродвигательного устройства ЭП бывают: непрерывного действия (подвижные части ЭД в установившемся режиме находятся в состоянии непрерывного движения) и дискретного действия (подвижные части находятся в состоянии дискретного движения).

Слайд 15Классификация ЭП
По роду тока ЭП разделяются на приводы постоянного и переменного
тока.
По характеру изменения параметров ЭП могут быть регулируемыми и нерегулируемыми; параметры регулируемых электроприводов изменяются под воздействием регулирующего устройства, нерегулируемых – в результате возмущающих воздействий.
Электропривод может получать питание от сети, а может быть автономным, т.е. получать питание от аккумуляторов или от теплового двигателя (дизель-электрический или турбоэлектрический привод).
По виду преобразовательного устройства ЭП разделяются на вентильные, тиристорные, транзисторные и с преобразователями частоты.
По характеру изменения параметров ЭП могут быть регулируемыми и нерегулируемыми; параметры регулируемых электроприводов изменяются под воздействием регулирующего устройства, нерегулируемых – в результате возмущающих воздействий.
Электропривод может получать питание от сети, а может быть автономным, т.е. получать питание от аккумуляторов или от теплового двигателя (дизель-электрический или турбоэлектрический привод).
По виду преобразовательного устройства ЭП разделяются на вентильные, тиристорные, транзисторные и с преобразователями частоты.

Слайд 16Классификация ЭП
По выполняемым функциям электроприводы бывают автоматизированными и неавтоматизированными. Автоматизированные
ЭП делятся на программно-управляемые, следящие, позиционные и адаптивные (автоматически избирающие структуру или параметры системы регулирования при изменениях условий работы).
По виду связей с исполнительным органом рабочей машины существуют безредукторные, редукторные, маховиковые и электрогидравлические ЭП.
По виду связей с исполнительным органом рабочей машины существуют безредукторные, редукторные, маховиковые и электрогидравлические ЭП.

Слайд 17Преимущества ЭП
По сравнению с другими видами привода рабочих машин электропривод имеет
следующие преимущества:
электродвигатели имеют высокий к.п.д. – 75…90% против 28…34% у тепловых двигателей;
электродвигатели обладают повышенным пусковым моментом;
электродвигатели проще по устройству, безопаснее и дешевле ДВС;
электропривод легко автоматизируется и управляется:
электропривод легко приблизить к рабочему органу или встроить в исполнительный механизм.
электродвигатели имеют высокий к.п.д. – 75…90% против 28…34% у тепловых двигателей;
электродвигатели обладают повышенным пусковым моментом;
электродвигатели проще по устройству, безопаснее и дешевле ДВС;
электропривод легко автоматизируется и управляется:
электропривод легко приблизить к рабочему органу или встроить в исполнительный механизм.


Слайд 19Механические характеристики рабочих машин
Если х = 0, то получаем
механическую характеристику, не зависящую от скорости, для которой М = Мсн Такая характеристика у подъемных кранов, лебедок. К этой группе могут быть отнесены механизмы, у которых основное сопротивление создают силы трения (навозоуборочные транспортеры, кормораздатчики, шнеки, конвейеры, барабаны сушилок, триеры).

Слайд 20Механические характеристики рабочих машин
При х=1 получается линейно-возрастающая характеристика Ею обладают
многие машины, у которых основные сопротивления создаются силами трения совместно с аэродинамическими (молотилки, дробилки кормов, лесопильные рамы, зерноочистительные машины). Иногда такая характеристика называется генераторной, так как она присуща генераторам постоянного тока независимого возбуждения при постоянной нагрузке.

Слайд 21Механические характеристики рабочих машин
Если х=2, то момент сопротивления пропорционален квадрату угловой
скорости (рис. 1.5). Такая характеристика называется вентиляторной. Так изменяется момент сопротивления вентиляторов, компрессоров, центробежных насосов, сепараторов, пневматических транспортеров и других механизмов, принцип работы которых основан на законах аэро- и гидродинамики
. Такая")
Слайд 22Механические характеристики рабочих машин
Если х = -1, получается нелинейно спадающая характеристика,
для которой момент сопротивления изменяется обратно пропорционально скорости, а мощность остается постоянной ( металлорежущие станки, у которых с увеличением подачи скорость вращения деталей уменьшается).


Слайд 24Механические и электромеханические характеристики электродвигателей. Жесткость механических хатактеристик
Механической характеристикой электродвигателя называется
зависимость скорости от электромагнитного момента, развиваемого электродвигателем в установившемся режиме, то есть ω = f (M).
Механические характеристики электродвигателей могут быть представлены как M = f(ω).
Различают естественную и искусственную характеристики электродвигателей. Естественная характеристика соответствует основной схеме включения электродвигателя и номинальным параметрам питающего напряжения.
Если двигатель включен не по основной схеме, или в его электрические цепи включены дополнительные элементы, или же двигатель питается напряжением с неноминальными параметрами, то он будет иметь искусственные характеристики.
Таких характеристик может быть сколь угодно много; иногда они называются регулировочными.
Механические характеристики электродвигателей могут быть представлены как M = f(ω).
Различают естественную и искусственную характеристики электродвигателей. Естественная характеристика соответствует основной схеме включения электродвигателя и номинальным параметрам питающего напряжения.
Если двигатель включен не по основной схеме, или в его электрические цепи включены дополнительные элементы, или же двигатель питается напряжением с неноминальными параметрами, то он будет иметь искусственные характеристики.
Таких характеристик может быть сколь угодно много; иногда они называются регулировочными.

Слайд 25Механические и электромеханические характеристики электродвигателей. Жесткость механических характеристик
Качественно механические характеристики электродвигателя
оцениваются жесткостью β, определяемой как
β = dM/dω ≅ ΔM/Δω
Используя этот показатель, можно оценивать характеристику 1 синхронного электродвигателя на рис. как абсолютно жесткую, характеристику асинхронного электродвигателя 3 – как имеющую переменную жесткость, характеристику 2 электродвигателя постоянного тока независимого возбуждения как жесткую, характеристику 4 электродвигателя постоянного тока последовательного возбуждения – как мягкую.
β = dM/dω ≅ ΔM/Δω
Используя этот показатель, можно оценивать характеристику 1 синхронного электродвигателя на рис. как абсолютно жесткую, характеристику асинхронного электродвигателя 3 – как имеющую переменную жесткость, характеристику 2 электродвигателя постоянного тока независимого возбуждения как жесткую, характеристику 4 электродвигателя постоянного тока последовательного возбуждения – как мягкую.

Слайд 26МЕХАНИЧЕСКИЕ ХАРАКТЕРИСТИКИ ЭЛЕКТРОДВИГАТЕЛЕЙ
ω
1
2
4
3
М
Рис. Механические характеристики электродвигателей.1- абсолютно жесткая
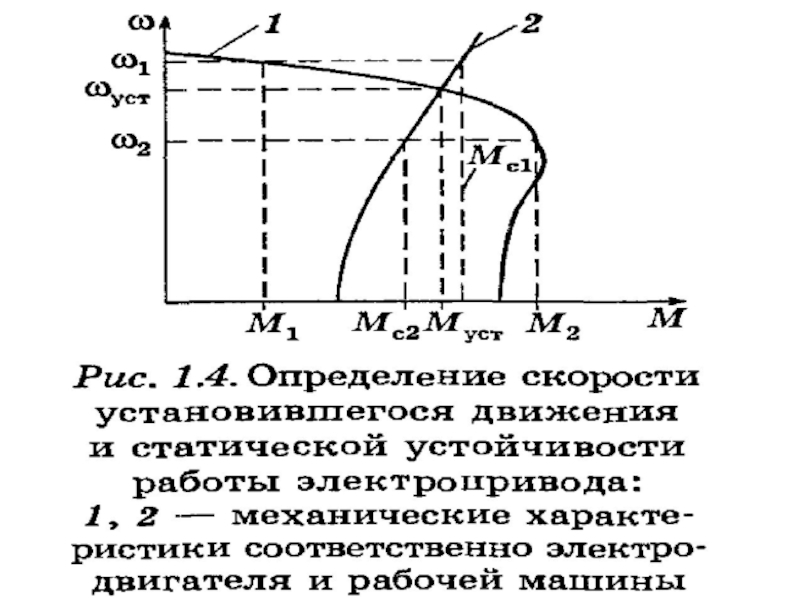
Используя механические характеристики исполнительных органов и электродвигателей можно выполнять проверку условия установившегося движения электропривода.
Для этого в одном квадранте совмещаются характеристики электродвигателя 1 и исполнительного органа 2
1
2
4
3
М
Рис. Механические характеристики электродвигателей.1- абсолютно жесткая
Используя механические характеристики исполнительных органов и электродвигателей можно выполнять проверку условия установившегося движения электропривода.
Для этого в одном квадранте совмещаются характеристики электродвигателя 1 и исполнительного органа 2

Слайд 28КИНЕМАТИЧЕСКИЕ И РАСЧЕТНЫЕ СХЕМЫ ЭЛЕКТРОПРИВОДА. ОПРЕДЕЛЕНИЕ ПРИВЕДЕННЫХ МОМЕНТОВ СОПРОТИВЛЕНИЯ И ИНЕРЦИИ

Слайд 29КИНЕМАТИЧЕСКИЕ И РАСЧЕТНЫЕ СХЕМЫ ЭЛЕКТРОПРИВОДА. ОПРЕДЕЛЕНИЕ ПРИВЕДЕННЫХ МОМЕНТОВ СОПРОТИВЛЕНИЯ И ИНЕРЦИИ

Слайд 30КИНЕМАТИЧЕСКИЕ И РАСЧЕТНЫЕ СХЕМЫ ЭЛЕКТРОПРИВОДА. ОПРЕДЕЛЕНИЕ ПРИВЕДЕННЫХ МОМЕНТОВ СОПРОТИВЛЕНИЯ И ИНЕРЦИИ

Слайд 31КИНЕМАТИЧЕСКИЕ И РАСЧЕТНЫЕ СХЕМЫ ЭЛЕКТРОПРИВОДА. ОПРЕДЕЛЕНИЕ ПРИВЕДЕННЫХ МОМЕНТОВ СОПРОТИВЛЕНИЯ И ИНЕРЦИИ

Слайд 32КИНЕМАТИЧЕСКИЕ И РАСЧЕТНЫЕ СХЕМЫ ЭЛЕКТРОПРИВОДА. ОПРЕДЕЛЕНИЕ ПРИВЕДЕННЫХ МОМЕНТОВ СОПРОТИВЛЕНИЯ И ИНЕРЦИИ

Слайд 33КИНЕМАТИЧЕСКИЕ И РАСЧЕТНЫЕ СХЕМЫ ЭЛЕКТРОПРИВОДА. ОПРЕДЕЛЕНИЕ ПРИВЕДЕННЫХ МОМЕНТОВ СОПРОТИВЛЕНИЯ И ИНЕРЦИИ

Слайд 34КИНЕМАТИЧЕСКИЕ И РАСЧЕТНЫЕ СХЕМЫ ЭЛЕКТРОПРИВОДА. ОПРЕДЕЛЕНИЕ ПРИВЕДЕННЫХ МОМЕНТОВ СОПРОТИВЛЕНИЯ И ИНЕРЦИИ










































")
")
")
")
")
")
")
")
")