- Главная
- Разное
- Дизайн
- Бизнес и предпринимательство
- Аналитика
- Образование
- Развлечения
- Красота и здоровье
- Финансы
- Государство
- Путешествия
- Спорт
- Недвижимость
- Армия
- Графика
- Культурология
- Еда и кулинария
- Лингвистика
- Английский язык
- Астрономия
- Алгебра
- Биология
- География
- Детские презентации
- Информатика
- История
- Литература
- Маркетинг
- Математика
- Медицина
- Менеджмент
- Музыка
- МХК
- Немецкий язык
- ОБЖ
- Обществознание
- Окружающий мир
- Педагогика
- Русский язык
- Технология
- Физика
- Философия
- Химия
- Шаблоны, картинки для презентаций
- Экология
- Экономика
- Юриспруденция
Основы биомеханики. Механические свойства биологических тканей презентация
Содержание
- 1. Основы биомеханики. Механические свойства биологических тканей
- 2. ОСНОВЫ БИОМЕХАНИКИ Механические свойства биологических тканей.
- 3. БИОМЕХАНИКА – это раздел биофизики, изучающий механические
- 4. Движения живых существ интересовали человека с давних
- 5. В развитии биомеханики особенно велика роль Леонардо да
- 6. Итальянский астроном, математик и врач Джованни Альфонсо Борелли (1608-1679)
- 7. Жак Луи Дагер (1787 – 1851) в
- 8. Петр Францевич Лесгафт (1837 – 1909) – известный
- 9. Николай Александрович Бернштейн (1896 – 1966) выдающийся русский
- 10. Биомеханика – смежная наука. на
- 11. Простейшей формой движения материи является механическое движение,
- 12. КИНЕМАТИКА Определение положения точки с помощью координат
- 13. Виды движения: Поступательное движение – это
- 14. Линию, которую описывает материальная точка
- 15. Перемещение - направленный отрезок (вектор), соединяющий начальное
- 16. Скорость это векторная величина, характеризующая быстроту изменения
- 17. Движение тела по окружности является частным случаем
- 18. Линейное
- 19. Угловая скорость измеряется в рад/с.
- 20. Таким образом, линейные скорости точек вращающегося тела
- 21. При равномерном движении тела по окружности величины
- 22. Модуль центростремительного ускорения связан с линейной V
- 23. Направление вектора полного ускорения
- 24. Масса тела (m) – мера инертности тела при поступательном движении.
- 25. ДИНАМИКА Изменение скорости движения тел происходит под действием сил
- 26. Первый закон Ньютона : Существуют такие
- 27. Если на тело одновременно действуют
- 28. Закон сохранения импульса: импульс замкнутой
- 29. Сила
- 30. Третий закон Ньютона. Тела
- 31. Рис. иллюстрирует третий закон Ньютона.
- 32. Человек действует на груз с такой же
- 33. СОЕДИНЕНИЯ И РЫЧАГИ
- 34. ОДНООСНОЕ ДВУХШАРНИРНОЕ СОЕДИНЕНИЕ О’ Система состоит
- 35. ДВУОСНОЕ ТРЕХШАРНИРНОЕ СОЕДИНЕНИЕ Система состоит из
- 36. ТРЕХОСНОЕ ЧЕТЫРЕХШАРНИРНОЕ СОЕДИНЕНИЕ L N’ Трехосное
- 37. Рычаг- твердое тело, имеющее неподвижную ось вращения,
- 38. ВИДЫ РЫЧАГОВ Рычаг I рода Рычаг II рода Рычаг силы Рычаг скорости
- 39. РЫЧАГ ПЕРВОГО РОД Рычаг первого
- 40. d1 d2
- 41. А B Б dB
- 42. Рычаг второго рода это рычаг, ось вращения
- 43. d1-плечо силы F1
- 44. ТИПЫ РЫЧАГОВ II РОДА Рычаг скорости, в
- 45. "рычаг скорости" - плечо приложения мышечной
- 46. У второго вида одноплечего рычага - "рычага
- 47. А В Б dБ
- 48. Первый вид рычага второго рода - "рычаг
- 49. Работа и энергия. Механической работой силы
- 50. Если сила переменная, то перемещение разбивают на
- 51. Эффективность совершения работы характеризуется мощностью. Мощность
- 52. Коэффициент полезного действия (КПД) равен отношению полезной
- 53. Энергия –физическая величина, характеризующая способность системы совершить
- 54. Изменение энергии системы при переходе из одного
- 55. Механическая энергия изолированной системы равна сумме кинетической
- 56. Полная энергия системы складывается из всех присущих
Слайд 1БИОФИЗИКА
Биофизика включает четыре раздела:
Молекулярная биофизика;
Биофизика клетки ;
Биофизика органов чувств;
Биофизика сложных систем;
биомеханика
радиобиология


Слайд 3БИОМЕХАНИКА – это раздел биофизики, изучающий механические свойства живых тканей, органов
Основной механической характеристикой механической системы является число степеней свободы
Свободное твердое тело может иметь как целое максимально 6 степеней свободы
ОБЩЕЕ ЧИСЛО СТЕПЕНЕЙ СВОБОДЫ ТЕЛА ЧЕЛОВЕКА - 240

Слайд 4Движения живых существ интересовали человека с давних времен.
Аристотель (384-322 до н.э.)
«De Motu Animalium» – «Движения животных».
Клавдий Гален (129 – 201 г.г. н.э.) – анатом, врач и естествоиспытатель,
написал более 400 трактатов по медицине, среди которых есть труд о функциях человеческого тела. Он считал, что мозг является средоточием движения, чувствительности и душевной деятельности.
 – выдающийся греческий ученый,")
Слайд 5В развитии биомеханики особенно велика роль Леонардо да Винчи (1452 – 1519) –
Рис. с тетради по анатомии.
 – выдающегося итальянского живописца, скульптора,")
Слайд 6Итальянский астроном, математик и врач Джованни Альфонсо Борелли (1608-1679) внес большой вклад в
немецкие исследователи братья
Эдуард и Вильгельм Веберы.
Эдуард Вебер был анатомом,
а Вильгельм – физиком
1836г. книга «Механика ходьбы человека»
Э. Вебером: «Сила мышцы, при прочих равных условиях, пропорциональна ее поперечному сечению»
 внес большой вклад в развитие биомеханики как науки.немецкие")
Слайд 7Жак Луи Дагер
(1787 – 1851)
в 1839 году им был разработан первый
французский физиолог
Этьен-Жюль Маре (1830-1904)
Э.Ж. Маре разработал метод пневмографии – записи опорных реакций с помощью передачи давления воздуха.
в 1839 году им был разработан первый практический способ фотографии французский")
Слайд 8Петр Францевич Лесгафт (1837 – 1909) – известный анатом, педагог рассмотрел ряд
Иван Михайлович Сеченов (1829-1905) – известный русский физиолог. В 1901г. Написал книгу «Очерк рабочих движений человека», в которой подробно рассмотрел следующие вопросы: работу опорно-двигательного аппарата, биомеханические свойства мышцы, функции верхней и нижней конечностей человека.
Алексей Алексеевич Ухтомский (1875 – 1942), профессор Ленинградского университета ,академик, написал книгу «Физиология двигательного аппарата», изданную в 1927.
 – известный анатом, педагог рассмотрел ряд проблем, смежных с биомеханикой:")
Слайд 9Николай Александрович Бернштейн (1896 – 1966) выдающийся русский физиолог и биомеханик
используя
английский физиолог
Арчибалд Вивиен Хилл (1886-1977)
В 1923 году он получил Нобелевскую премию по физиологии и медицине «За открытия в области теплообразования в мышце»
 выдающийся русский физиолог и биомеханик используя методику циклосъемки, получил огромный")
Слайд 10Биомеханика – смежная наука.
на «стыке» двух наук:
биологии – науки о жизни;
механики –
В биомеханике широко используются механические характеристики движущегося тела

Слайд 11Простейшей формой движения материи является механическое движение, которое состоит в перемещении
Тело, относительно которого определяется положение других (движущихся) тел, называется телом отсчета.
Тело отсчета, связанная с ним система координат, и отсчитывающие время часы образуют систему отсчета.

Слайд 12КИНЕМАТИКА Определение положения точки с помощью координат x = x(t), y = y(t) и z = z(t) и
, y = y(t) и z = z(t) и радиус–вектора r (t).")
Слайд 13Виды движения: Поступательное движение – это такое движение твёрдого тела, при котором
Вращательное движение – это такое движение, при котором все точки тела движутся по окружностям, центры которых лежат на одной и той же прямой, называемой осью вращения.

Слайд 14 Линию, которую описывает материальная точка при своем движении в
В зависимости от формы траектории различают:
- прямолинейное движение;
- криволинейное движение.

Слайд 15Перемещение - направленный отрезок (вектор), соединяющий начальное и конечное положение тела.
Пройденный
, соединяющий начальное и конечное положение тела.Пройденный путь - длина участка")
Слайд 16Скорость это векторная величина, характеризующая быстроту изменения координаты тела с течением
Ускорение это величина, характеризующая быстроту изменения скорости, первая производная скорости по времени, или вторая производная координаты по времени;

Слайд 17Движение тела по окружности является частным случаем криволинейного движения.
Наряду с вектором
Длина дуги связана с углом поворота соотношением Δl = RΔφ.
При малых углах поворота Δl ≈ Δs.


Слайд 19 Угловая скорость измеряется в рад/с. Связь между модулем линейной скорости V
Угловой скоростью ω тел в данной точке круговой траектории называют предел (при Δt → 0) отношения малого углового перемещения Δφ к малому промежутку времени Δt:

Слайд 20Таким образом, линейные скорости точек вращающегося тела пропорциональны их расстояниям от
Пример.
При выполнении гимнастом большого оборота на перекладине линейная скорость точки, расположенной в области тазобедренного сустава составляет 10,8 м/с,
а точки, расположенной в области голеностопного сустава – 18,0 м/с.

Слайд 21При равномерном движении тела по окружности величины V и ω остаются

Слайд 22Модуль центростремительного ускорения связан с линейной V и угловой ω скоростями

Слайд 23Направление вектора полного ускорения определяется в каждой точке круговой траектории

Слайд 24Масса тела (m) – мера инертности тела при поступательном движении.
Момент инерции тела (J ) –
Момент инерции зависит от распределения массы относительно оси вращения.
 – мера инертности тела при поступательном движении. Момент инерции тела (J ) – мера инертности твердого тела")
Слайд 25ДИНАМИКА
Изменение скорости движения тел происходит под действием сил
Сила – это физическая величина,
Работа – это физическая величина, характеризующая динамическое взаимодействие;
Энергия – это физическая величина, характеризующая способность системы совершать работу.

Слайд 26Первый закон Ньютона : Существуют такие системы отсчета, называемые инерциальными, относительно
Поскольку масса тела есть величина постоянная, то можно записать предыдущее выражение в виде уравнения движения материальной точки (основной закон динамики), где векторная величина называется импульсом (количеством движения) материальной точки

Слайд 27 Если на тело одновременно действуют несколько сил то под силой
Механическая система, на которую не действуют внешние силы, называется замкнутой (изолированной):
Следовательно, для изолированной (замкнутой) системы имеем
или
которые выражают закон сохранения импульса.

Слайд 28Закон сохранения импульса:
импульс замкнутой (изолированной) системы не изменяется с течением
Закон сохранения импульса справедлив для любой замкнутой системы частиц, и он является фундаментальным законом природы.
 системы не изменяется с течением времени. Закон сохранения импульса")
Слайд 29 Сила – равнодействующая силы тяжести

Слайд 30 Третий закон Ньютона. Тела действуют друг на друга с силами, равными


Слайд 32Человек действует на груз с такой же по модулю силой, с


Слайд 34ОДНООСНОЕ ДВУХШАРНИРНОЕ СОЕДИНЕНИЕ
О’
Система состоит из двух звеньев А и В,
При неподвижном звене В звено А имеет одну степень свободы как тело, вращающееся вокруг неподвижной оси.
Пример: плечелоктевое, фаланговое соединение.
1 степень свободы – сгибание и разгибание.

Слайд 35ДВУОСНОЕ ТРЕХШАРНИРНОЕ СОЕДИНЕНИЕ
Система состоит из трех звеньев: А, В и
Пример: лучезапястный сустав.
1 степень свободы – сгибание, разгибание.
2 степень свободы – отведение, приведение.

Слайд 36ТРЕХОСНОЕ ЧЕТЫРЕХШАРНИРНОЕ СОЕДИНЕНИЕ
L
N’
Трехосное соединение осуществляет вращение вокруг 3-х взаимно- перпендикулярных
Пример: тазобедренный и плечевой суставы.
1 степень свободы – сгибание, разгибание (в сагиттальной плоскости).
2 степень свободы – отведение, приведение (в фронтальной плоскости).
3 степень свободы – вращение вокруг продольной оси.

Слайд 37Рычаг- твердое тело, имеющее неподвижную ось вращения, на которое действуют силы,
Различают рычаги первого и второго рода.
РЫЧАГИ


Слайд 39РЫЧАГ ПЕРВОГО РОД
Рычаг первого рода- это рычаг, ось вращения которого


Слайд 41
А
B
Б
dB
dБ
(А) точка опоры
(ось вращения)
(В) точка сопротивления (сила тяжести)
(Б) точка приложения силы
Рычаг первого рода в биомеханике, носит название "рычаг равновесия".
Fтяж·dв=F·dБ
МFтяж=МF
 точка опоры(ось вращения)(В) точка сопротивления (сила тяжести)(Б) точка приложения силы (сила мышечного сокращения)Рычаг первого")
Слайд 42Рычаг второго рода
это рычаг, ось вращения которого расположена по одну сторону
РЫЧАГ ВТОРОГО РОДА


Слайд 44ТИПЫ РЫЧАГОВ II РОДА
Рычаг скорости, в котором происходит выигрыш в скорости
Рычаг силы, в котором происходит выигрыш в силе, но проигрыш в скорости.

Слайд 45
"рычаг скорости" - плечо приложения мышечной силы короче, чем плечо сопротивления,
точка вращения в локтевом суставе
dF
dFтяж
точка приложения силы
место крепления
мышц сгибателей
точка сопротивления
(сила тяжести)
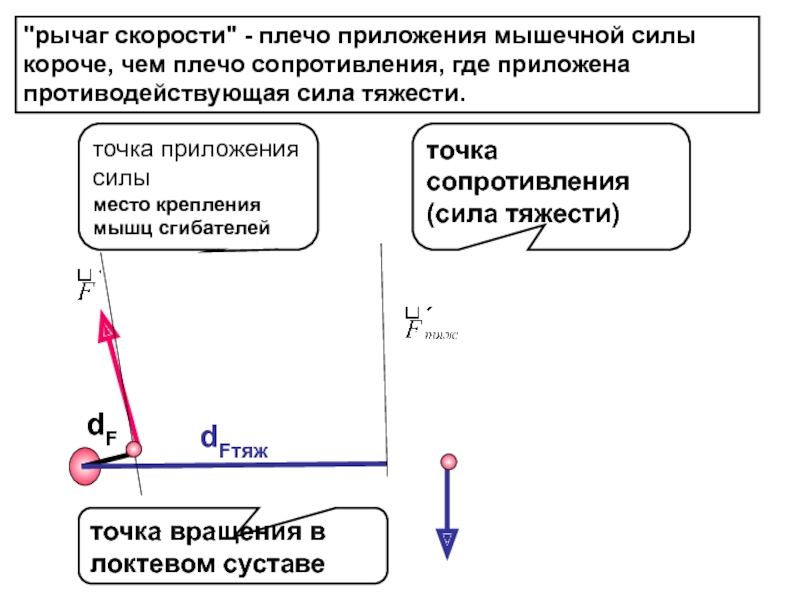
Слайд 46У второго вида одноплечего рычага - "рычага скорости" - плечо приложения
При этом происходит выигрыш в скорости и размахе движения более длинного рычага (точка сопротивления) и проигрыш в силе, действующей в точке приложения этой силы.

Слайд 47
А
В
Б
dБ
dB
"рычаг силы" - плечо приложения мышечной силы длиннее плеча силы тяжести.
Точкой
точкой приложения мышечной силы (трёхглавая мышца голени) является пяточная кость.
точка сопротивления (тяжесть тела) приходится на место сочленения костей голени со стопой (голеностопный сустав).
dБ>dB

Слайд 48Первый вид рычага второго рода - "рычаг силы" - имеет место
В этом рычаге происходит выигрыш в силе (плечо приложения силы длиннее) и проигрыш в скорости перемещения точки сопротивления (её плечо короче).

Слайд 49Работа и энергия.
Механической работой силы называется величина, равная произведению проекции

Слайд 50Если сила переменная, то перемещение разбивают на бесконечно малые отрезки, на

Слайд 51Эффективность совершения работы характеризуется мощностью. Мощность - величина, равная отношению работы

Слайд 52Коэффициент полезного действия (КПД) равен отношению полезной работы, совершенной машиной, к
 равен отношению полезной работы, совершенной машиной, к полной работе.")
Слайд 53Энергия –физическая величина, характеризующая способность системы совершить работу. Виды энергии : механическая,

Слайд 54Изменение энергии системы при переходе из одного состояния в другое равно

Слайд 55Механическая энергия изолированной системы равна сумме кинетической и потенциальной энергии и

Слайд 56Полная энергия системы складывается из всех присущих системе видов энергии. Опыт