подготовка»
- Главная
- Разное
- Дизайн
- Бизнес и предпринимательство
- Аналитика
- Образование
- Развлечения
- Красота и здоровье
- Финансы
- Государство
- Путешествия
- Спорт
- Недвижимость
- Армия
- Графика
- Культурология
- Еда и кулинария
- Лингвистика
- Английский язык
- Астрономия
- Алгебра
- Биология
- География
- Детские презентации
- Информатика
- История
- Литература
- Маркетинг
- Математика
- Медицина
- Менеджмент
- Музыка
- МХК
- Немецкий язык
- ОБЖ
- Обществознание
- Окружающий мир
- Педагогика
- Русский язык
- Технология
- Физика
- Философия
- Химия
- Шаблоны, картинки для презентаций
- Экология
- Экономика
- Юриспруденция
Навигационное оборудование бронеобъектов презентация
Содержание
- 1. Навигационное оборудование бронеобъектов
- 2. УЧЕБНЫЕ ВОПРОСЫ: 1.Подготовка рабочей карты для работы
- 3. Подготовка аппаратуры к работе заключается -
- 4. Подготовка рабочей карты для
- 5. Подготовка рабочей карты для
- 9. ОПРЕДЕЛЕНИЕ ИСХОДНОГО ДИРЕКЦИОННОГО УГЛА ОБЪЕКТА Дирекционный угол
- 15. Первая навигационная задача Первая навигационная задача
- 16. ПЕРВАЯ НАВИГАЦИОННАЯ ЗАДАЧА Решение первой навигационной
- 17. Из приведенных формул следует, что для решения
- 18. Вторая навигационная задача Вторая навигационная задача
- 19. ВТОРАЯ НАВИГАЦИОННАЯ ЗАДАЧА Исходными данными для
- 20. Третья навигационная задача Третья навигационная задача
- 21. ТРЕТЬЯ НАВИГАЦИОННАЯ ЗАДАЧА Для объектов, предназначенных
- 22. Задание на самостоятельную подготовку Отработать материал практического занятия; Тренироваться в решении навигационных задач.
Слайд 1Военная кафедра НИУ ВШЭ
Тема 37/2 : Навигационное оборудование бронеобъектов.
«Тактико - специальная

Слайд 2УЧЕБНЫЕ ВОПРОСЫ:
1.Подготовка рабочей карты для работы с навигационной аппаратурой. Способ и
порядок решения навигационных задач.
Способ и порядок решения навигационных задач.
Работа на аппаратуре в особых условиях. Техническое обслуживание ТНА
Способ и порядок решения навигационных задач.
Работа на аппаратуре в особых условиях. Техническое обслуживание ТНА

Слайд 3Подготовка аппаратуры к работе заключается
- в изучении маршрута движения и
оформление его на карте;
- в подготовке исходных данных;
- первоначальном ориентировании (определении дирекционного угла объекта);
- вводе исходных данных в аппаратуру;
- в установке топографической карты в планшет.
- в подготовке исходных данных;
- первоначальном ориентировании (определении дирекционного угла объекта);
- вводе исходных данных в аппаратуру;
- в установке топографической карты в планшет.

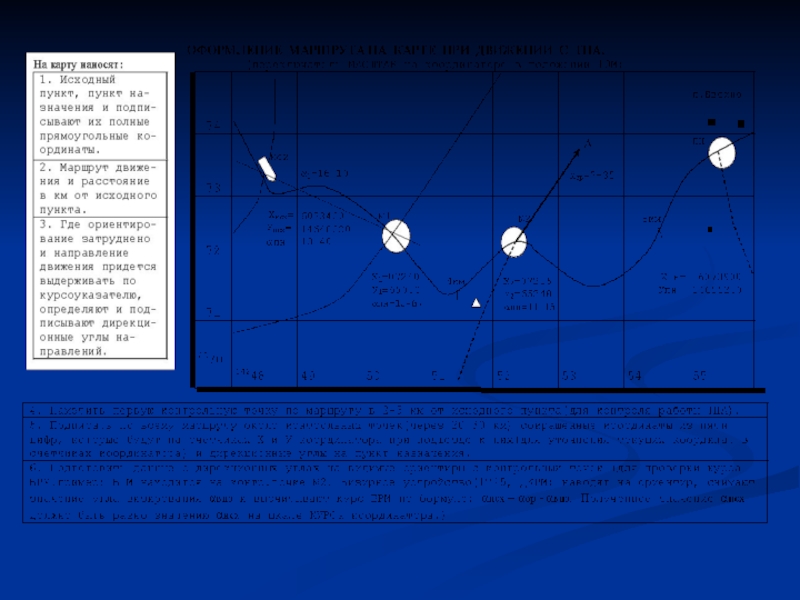
Слайд 4 Подготовка рабочей карты для работы на ТНА.
- исходный
пункт, пункт назначения и подписывают их полные прямоугольные координаты;
- маршрут движения и расстояние в км до контрольных точек от исходного пункта;
- контрольные точки:
- первую по маршруту намечают в 2-3 км от исходного пункта и используют в качестве контрольной точки для контроля работы аппаратуры;
- затем по всему маршруту примерно через 20-30 км;
и подписывают сокращенные координаты из пяти цифр, которые будут на счетчиках Х и У при наезде на эти контрольные точки;
- дирекционные углы на видимые ориентиры и на пункт назначения с контрольных точек для контроля работы аппаратуры в процессе марша и уточнения текущих координат;
- где ориентирование затруднено и направление движения придется выдерживать по курсоуказателю, определяют и подписывают дирекционные углы направлений.
- маршрут движения и расстояние в км до контрольных точек от исходного пункта;
- контрольные точки:
- первую по маршруту намечают в 2-3 км от исходного пункта и используют в качестве контрольной точки для контроля работы аппаратуры;
- затем по всему маршруту примерно через 20-30 км;
и подписывают сокращенные координаты из пяти цифр, которые будут на счетчиках Х и У при наезде на эти контрольные точки;
- дирекционные углы на видимые ориентиры и на пункт назначения с контрольных точек для контроля работы аппаратуры в процессе марша и уточнения текущих координат;
- где ориентирование затруднено и направление движения придется выдерживать по курсоуказателю, определяют и подписывают дирекционные углы направлений.

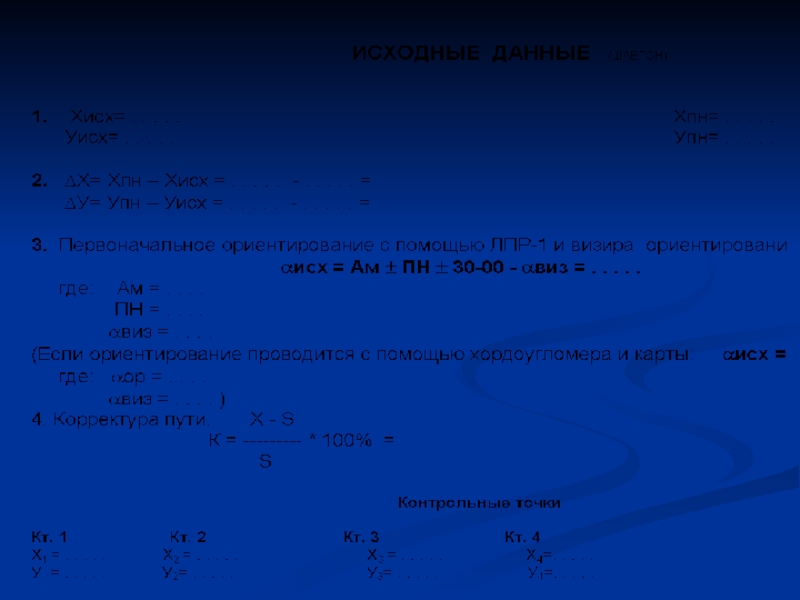
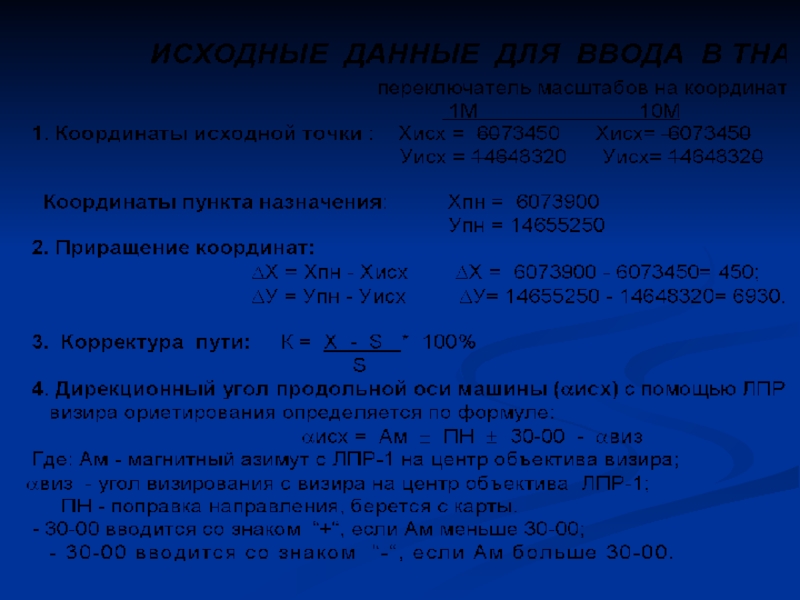
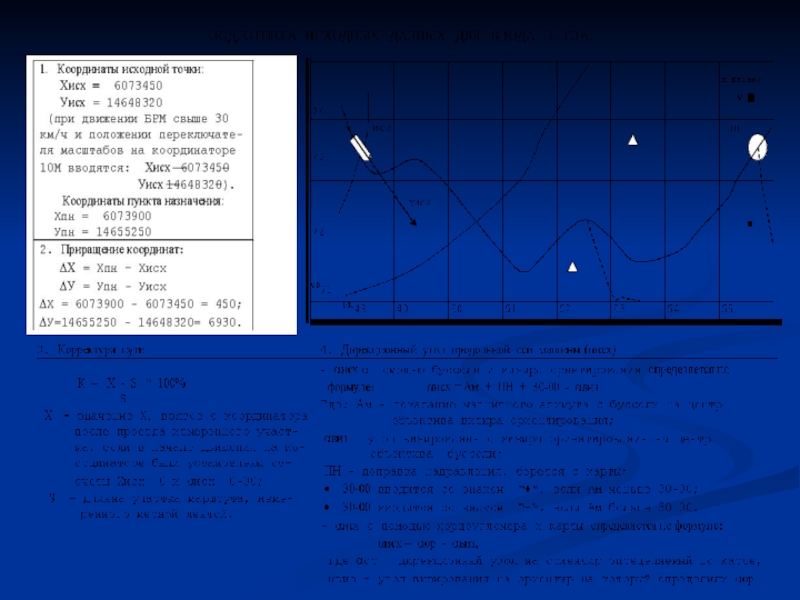
Слайд 5 Подготовка рабочей карты для работы на ТНА.
-
координат исходного пункта Хисх, Уисх и пункта назначения Хпн, Упн;
- разностей координат между пунктом назначения и исходным пунктом: Х = Хпн – Хисх и У = Упн – Уисх;
- дирекционного угла продольной оси машины - исх;
- величины корректуры пути;
Величину корректуры пути определяют контрольным проездом измеренного мерной лентой прямолинейного участка маршрута на местности, характерной для района предстоящих действий. Отсчет, который необходимо установить на шкале КОРРЕКТУРА ПУТИ, рассчитывают по формуле:
Х-S
К= 100 %
S
Х- отсчет по счетчику Х координатора после проезда измеренного участка, если на координаторе были установлены отсчеты Хисх = 0 и исх = 0 - 00 ;
S- длина участка маршрута, измеренного мерной лентой.
В качестве исходного пункта следует выбирать контурные точки местности (мосты, памятники, железнодорожные переезды...)
- разностей координат между пунктом назначения и исходным пунктом: Х = Хпн – Хисх и У = Упн – Уисх;
- дирекционного угла продольной оси машины - исх;
- величины корректуры пути;
Величину корректуры пути определяют контрольным проездом измеренного мерной лентой прямолинейного участка маршрута на местности, характерной для района предстоящих действий. Отсчет, который необходимо установить на шкале КОРРЕКТУРА ПУТИ, рассчитывают по формуле:
Х-S
К= 100 %
S
Х- отсчет по счетчику Х координатора после проезда измеренного участка, если на координаторе были установлены отсчеты Хисх = 0 и исх = 0 - 00 ;
S- длина участка маршрута, измеренного мерной лентой.
В качестве исходного пункта следует выбирать контурные точки местности (мосты, памятники, железнодорожные переезды...)

Слайд 9ОПРЕДЕЛЕНИЕ ИСХОДНОГО ДИРЕКЦИОННОГО УГЛА ОБЪЕКТА
Дирекционный угол машины (исх) можно определить:
-
с помощью гирокомпаса (1Г11, 1Г25...);
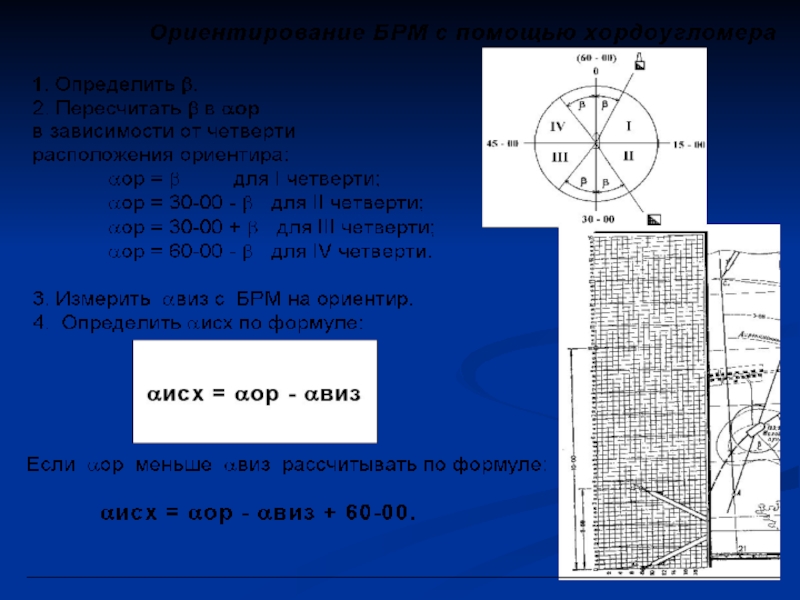
- по топографической карте с помощью хордоугломера;
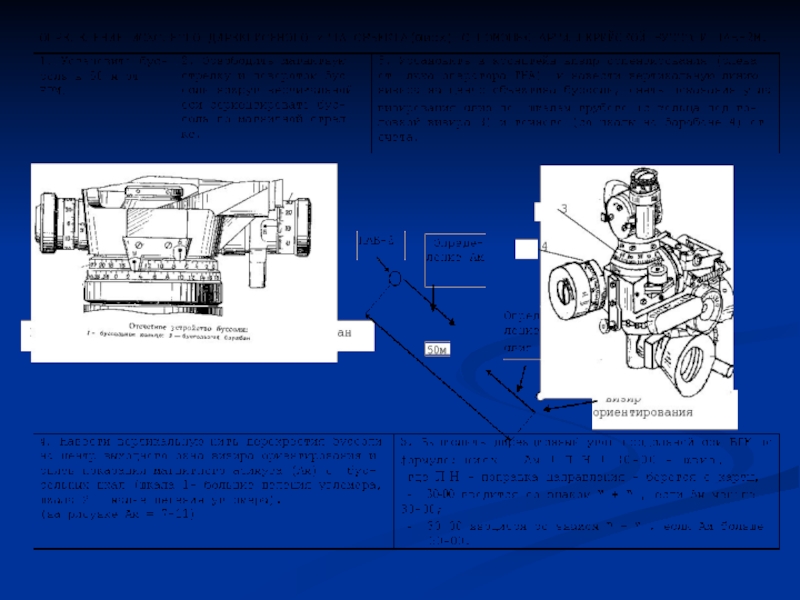
- с помощью буссоли ПАБ-2А;
- по каталогам координат геодезических пунктов;
- по звездам при помощи азимутальной насадки АНБ-1 буссоли;
- путем решения обратной геодезической задачи.
- по топографической карте с помощью хордоугломера;
- с помощью буссоли ПАБ-2А;
- по каталогам координат геодезических пунктов;
- по звездам при помощи азимутальной насадки АНБ-1 буссоли;
- путем решения обратной геодезической задачи.
 можно определить: - с помощью гирокомпаса (1Г11,")
Слайд 15Первая навигационная задача
Первая навигационная задача - определение плоских прямоугольных геодезических координат
X и Y местоположения подвижного объекта и его дирекционный угол;
Для решения первой навигационной задачи используются параметры движения объекта: скорость и дирекционный угол.
Для решения первой навигационной задачи используются параметры движения объекта: скорость и дирекционный угол.

Слайд 16ПЕРВАЯ НАВИГАЦИОННАЯ ЗАДАЧА
Решение первой навигационной задачи
Для решения задачи используются
параметры движения объекта: скорость и дирекционный угол. Принцип определения координат X и Y местоположения объекта при его движении по горизонтальному участку сводится следующему:
Условия:
Объект передвигается из точки 0 к точкам 1, 2 и т. д.
За малый промежуток времени Δt его скорость v и дирекционный угол а остаются неизменными.
Криволинейный путь объекта можно заменить прямолинейными участками ΔS1r, ΔS2r и т. д.
Приращения координат ΔХ и ΔY на этих участках будут равны:
Координаты объекта в любой момент могут быть получены алгебраическим суммированием исходных координат Хисх и Yисх с приращениями координат ∑ΔХi, и ∑ΔYi, то есть:

Слайд 17Из приведенных формул следует, что для решения первой навигационной задачи необходимо:
непрерывно
измерять скорость v движения объекта или соответствующее ей приращение пути ΔS = νΔt;
непрерывно измерять дирекционный угол а движущегося объекта;
вычислять тригонометрические функции Sinα и Cоsα дирекционного угла объекта;
алгебраически суммировать приращения координат ΔХ и ΔY как соответствующее произведение ΔSisinα и ΔSicosα;
суммировать полученные приращения координат с координатами исходной точки;
регистрировать текущие координаты и текущий дирекционный угол, а при необходимости и пройденный объектом путь.
непрерывно измерять дирекционный угол а движущегося объекта;
вычислять тригонометрические функции Sinα и Cоsα дирекционного угла объекта;
алгебраически суммировать приращения координат ΔХ и ΔY как соответствующее произведение ΔSisinα и ΔSicosα;
суммировать полученные приращения координат с координатами исходной точки;
регистрировать текущие координаты и текущий дирекционный угол, а при необходимости и пройденный объектом путь.

Слайд 18Вторая навигационная задача
Вторая навигационная задача - определение дирекционного угла на пункт
назначения и дальности до него.
Исходными данными для решения второй навигационной задачи являются координаты пункта назначения и текущие координаты объекта.
Исходными данными для решения второй навигационной задачи являются координаты пункта назначения и текущие координаты объекта.

Слайд 19ВТОРАЯ НАВИГАЦИОННАЯ ЗАДАЧА
Исходными данными для решения второй навигационной задачи являются
координаты Хпн и Упн пункта назначения и текущие координаты Хт и Ут объекта.
Решение второй навигационной
задачи:
а-схема взаимного расположения объекта
и пункта назначения; б-схема взаимного
расположения объекта и пункта назначения
Принцип решения второй навигационной задачи сводится к следующему:
Из прямоугольного треугольника АВС дальность до пункта назначения Sпн и дирекционный угол апн на него определяются из соотношений:
В некоторых случаях вторая задача решается не в полном объеме, а ограничивается определением апн и приращений по координатным осям ΔХПН и ΔУПН от объекта до пункта назначения.

Слайд 20Третья навигационная задача
Третья навигационная задача — определение плоских прямоугольных геодезических координат
цели Х и У по известным плоским прямоугольным геодезическим координатам объекта, дальности до цели и дирекционному углу на цель.
Необходимость решения третьей навигационной задачи возникает на объектах, которые предназначены для ведения разведки и определения координат обнаруженных целей. Входными данными для решения этой задачи являются дальность до цели и угол визирования на нее.
Необходимость решения третьей навигационной задачи возникает на объектах, которые предназначены для ведения разведки и определения координат обнаруженных целей. Входными данными для решения этой задачи являются дальность до цели и угол визирования на нее.

Слайд 21ТРЕТЬЯ НАВИГАЦИОННАЯ ЗАДАЧА Для объектов, предназначенных для ведения разведки и определения
координат обнаруженных целей.
Входными данными для решения этой задачи являются дальность до цели SЦ и угол визирования αвиз на нее. Зная текущие координаты объекта Хт и Ут и его дирекционный угол ат, представляется возможным определить координаты Хц и Уц цели по углу визирования αвиз на цель и дальности SЦ до нее.

Слайд 22Задание на самостоятельную подготовку
Отработать материал практического занятия;
Тренироваться в решении навигационных задач.