Демкин В.И.
- Главная
- Разное
- Дизайн
- Бизнес и предпринимательство
- Аналитика
- Образование
- Развлечения
- Красота и здоровье
- Финансы
- Государство
- Путешествия
- Спорт
- Недвижимость
- Армия
- Графика
- Культурология
- Еда и кулинария
- Лингвистика
- Английский язык
- Астрономия
- Алгебра
- Биология
- География
- Детские презентации
- Информатика
- История
- Литература
- Маркетинг
- Математика
- Медицина
- Менеджмент
- Музыка
- МХК
- Немецкий язык
- ОБЖ
- Обществознание
- Окружающий мир
- Педагогика
- Русский язык
- Технология
- Физика
- Философия
- Химия
- Шаблоны, картинки для презентаций
- Экология
- Экономика
- Юриспруденция
Выпускная квалификационная работа презентация
Содержание
Слайд 1ВЫПУСКНАЯ КВАЛИФИКАЦИОННАЯ РАБОТА
ЦИФРОВОЙ БЛОК УПРАВЛЕНИЯ СИСТЕМОЙ ПРИВОДНЫХ МЕХАНИЗМОВ
Студентка
Научный руководитель
к.т.н., доцент
Царицына
Л.Г.

Слайд 2Цель работы: разработка цифрового блока
управления системой приводных механизмов
Задачи:
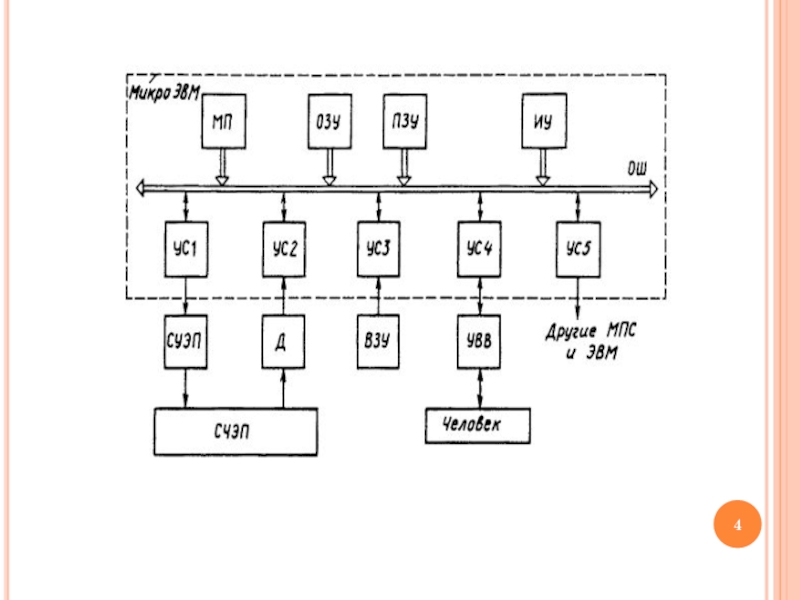
1) Проанализировать
объект управления
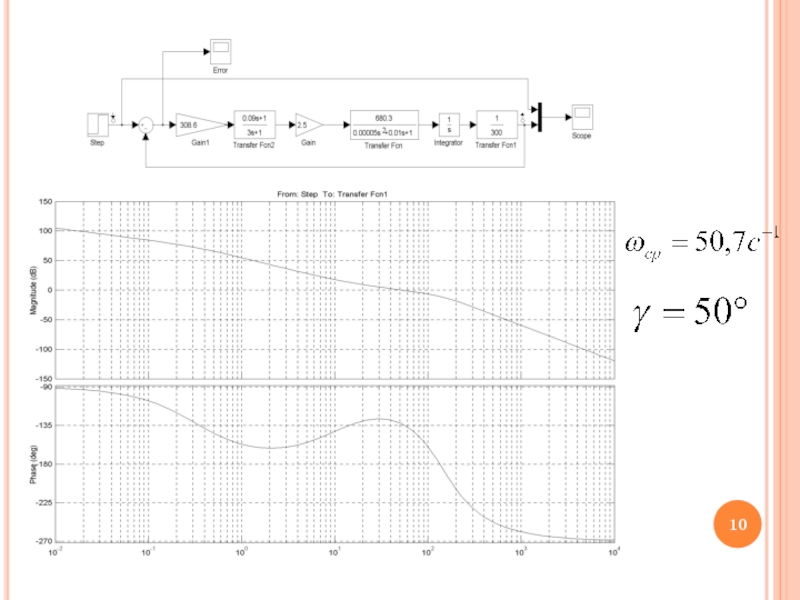
2) Синтезировать линейный регулятор в соответствии с
желаемыми параметрами
3) Промоделировать линейную модель системы управления в
программном пакете
4) На основе линейной модели составить дискретную
передаточную функцию регулятора и получить разностные
уравнения
2) Синтезировать линейный регулятор в соответствии с
желаемыми параметрами
3) Промоделировать линейную модель системы управления в
программном пакете
4) На основе линейной модели составить дискретную
передаточную функцию регулятора и получить разностные
уравнения
 Проанализировать объект управления2) Синтезировать линейный")
Слайд 3
Технические требования:
1) диапазон входных воздействий ±10В, диапазон выходных воздействий ±15В;
2) точность
навода механизма 0,1º;
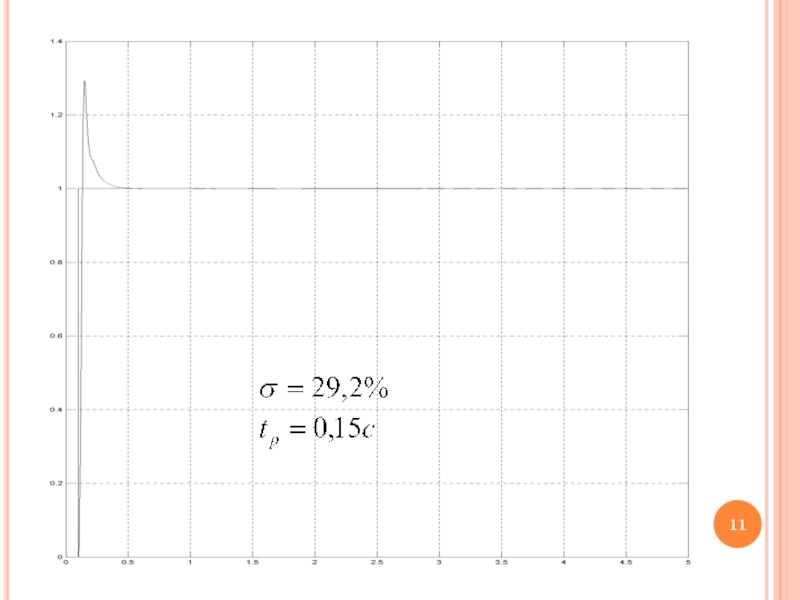
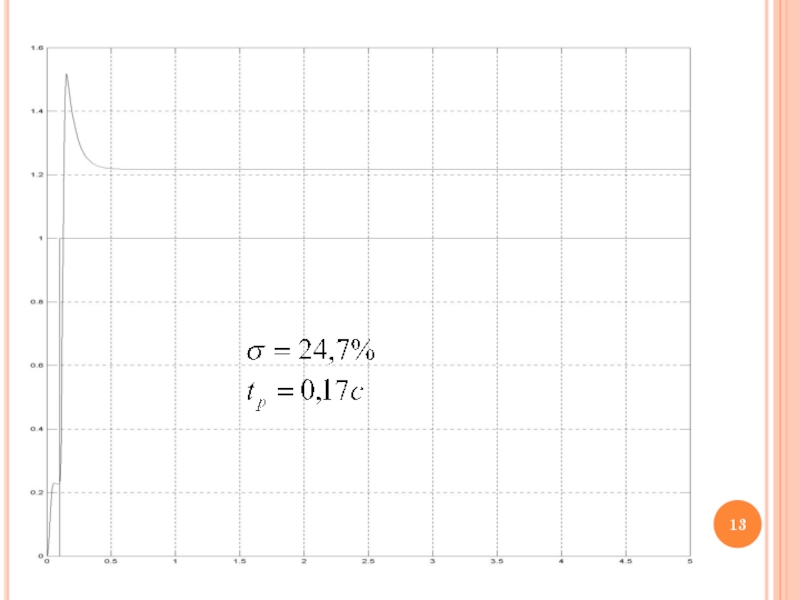
3) время регулирования не более 0,3 с;
4) перерегулирование не более 30%;
5) частота дискретизации не более 200 Гц.
3) время регулирования не более 0,3 с;
4) перерегулирование не более 30%;
5) частота дискретизации не более 200 Гц.
 диапазон входных воздействий ±10В, диапазон выходных воздействий ±15В;2) точность навода механизма 0,1º;3) время")





Слайд 15Выводы:
Провели синтез линейного регулятора двигателя постоянного тока
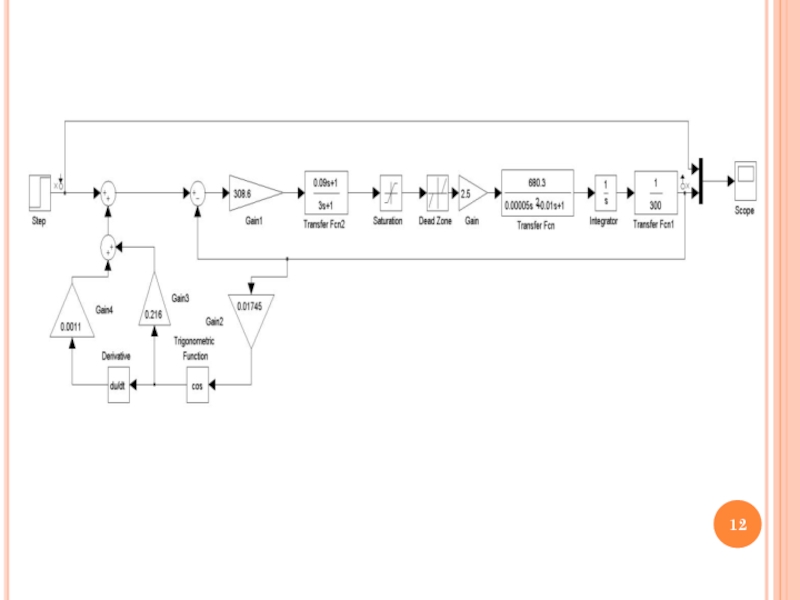
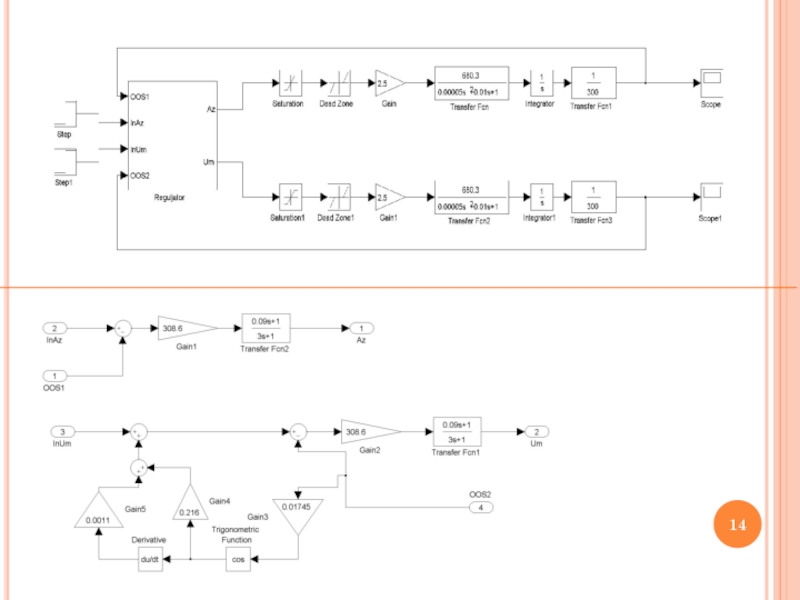
Смоделировали блок управления системой приводных
механизмов в среде MATLAB Simulink
Получили дискретную передаточную функцию регулятора и разностные уравнения, описывающие цифровой блок управления электроприводов
Получили дискретную передаточную функцию регулятора и разностные уравнения, описывающие цифровой блок управления электроприводов