Mitsubishi Electric Research Labs (MERL)
Cambridge, MA
Prakash: Lighting-Aware Motion Capture Using
Photosensing Markers and Multiplexed Illuminators
Prakash: Lighting-Aware Motion Capture Using
Photosensing Markers and Multiplexed Illuminators




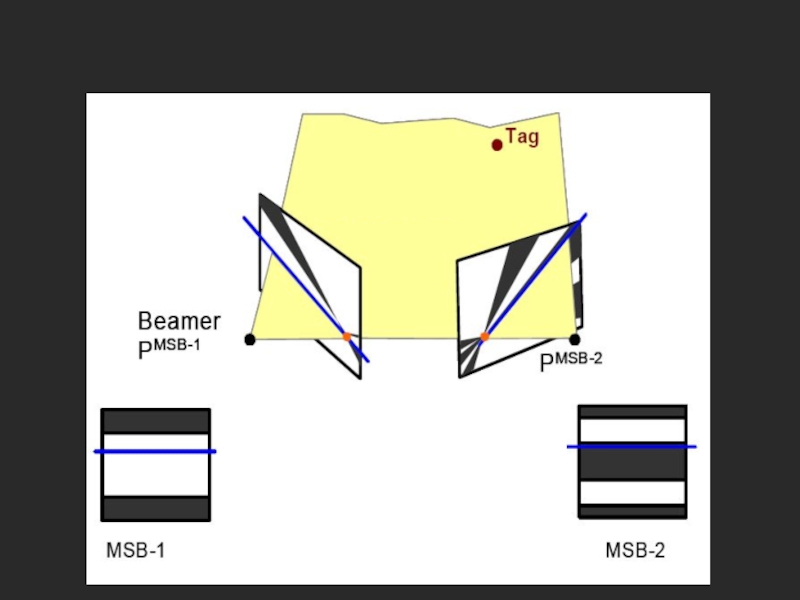
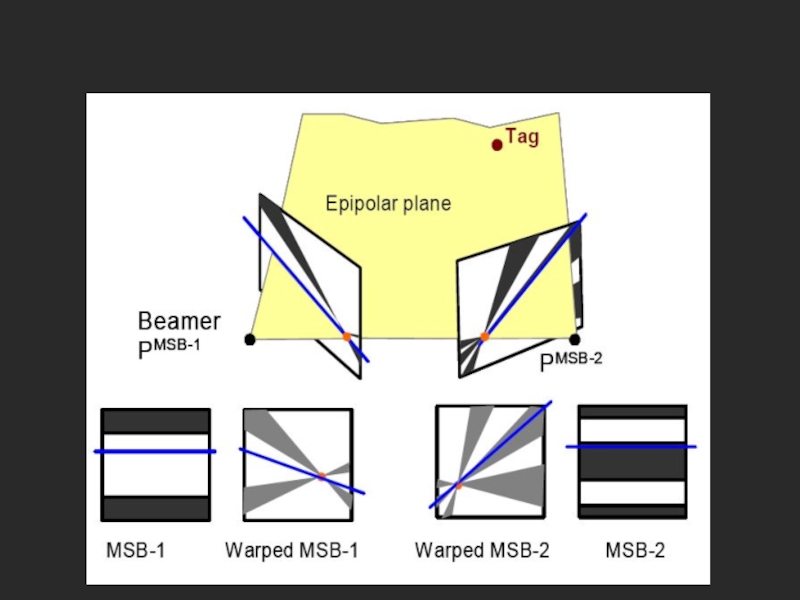
Projector
Tag
x=0
x=255
Time
Each location receives a unique temporal codeBut 60Hz video projector is too slowProjectorTagx=0x=255Time")
0
1
1
0
0
X=12
Binary Gray-codes



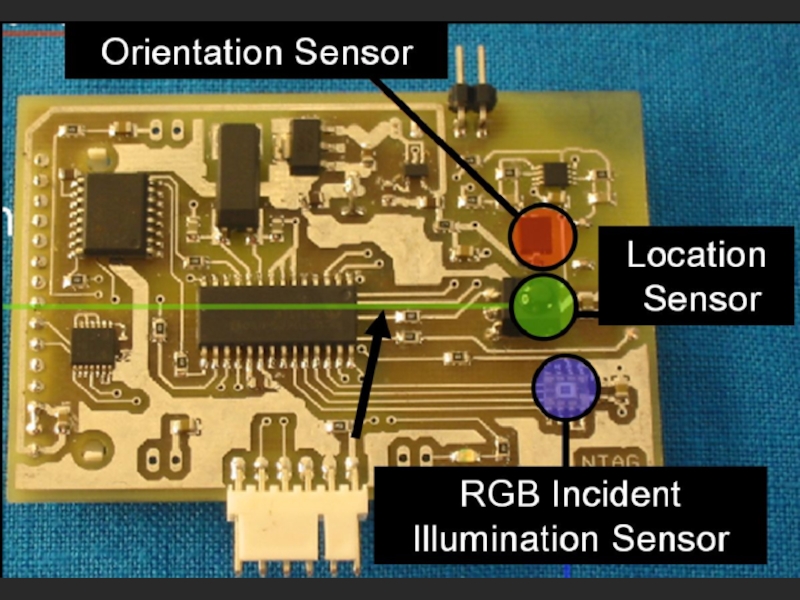
 ModulationInter-reflectionsBinary optical communicationWires on TagsBatteries +")




1M at 500fps

Если не удалось найти и скачать презентацию, Вы можете заказать его на нашем сайте. Мы постараемся найти нужный Вам материал и отправим по электронной почте. Не стесняйтесь обращаться к нам, если у вас возникли вопросы или пожелания:
Email: Нажмите что бы посмотреть
Это сайт презентаций, докладов, проектов, шаблонов в формате PowerPoint. Мы помогаем школьникам, студентам, учителям, преподавателям хранить и обмениваться учебными материалами с другими пользователями.