- Главная
- Разное
- Дизайн
- Бизнес и предпринимательство
- Аналитика
- Образование
- Развлечения
- Красота и здоровье
- Финансы
- Государство
- Путешествия
- Спорт
- Недвижимость
- Армия
- Графика
- Культурология
- Еда и кулинария
- Лингвистика
- Английский язык
- Астрономия
- Алгебра
- Биология
- География
- Детские презентации
- Информатика
- История
- Литература
- Маркетинг
- Математика
- Медицина
- Менеджмент
- Музыка
- МХК
- Немецкий язык
- ОБЖ
- Обществознание
- Окружающий мир
- Педагогика
- Русский язык
- Технология
- Физика
- Философия
- Химия
- Шаблоны, картинки для презентаций
- Экология
- Экономика
- Юриспруденция
Лекция 1. Технические средства автоматизации. Предмет и основные понятия презентация
Содержание
- 1. Лекция 1. Технические средства автоматизации. Предмет и основные понятия
- 2. Автоматика — это отрасль науки и
- 3. Любая система управления должна
- 5. В САУ все функции выполняются автоматически при
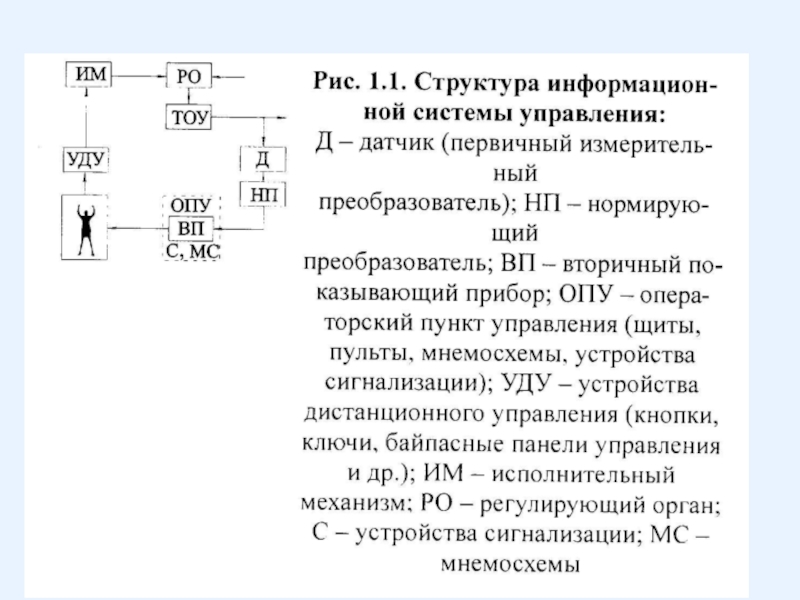
- 8. ОПУ - операторский пункт управления; Д
- 9. Автоматизированные системы управления технологическими процессами (АСУТП)
- 11. Типовые средства автоматизации могут быть: техническими; аппаратными; программно-техническими; общесистемными .
- 13. ИУВК: ЛВС, серверы, ERP-, MES-системы. Здесь реализуются
- 14. К техническим средствам автоматизации (ТСА) относят:
- 15. К программно-техническим средствам автоматизации относят: аналого-цифровые
- 16. В системах автоматического управления в
- 17. Элементом автоматики называется
- 20. Комплексы различных технических устройств
- 21. Обозначим через y(t) функцию, описывающую изменение во
- 22. По выполняемым функциям основные элементы
- 23. Датчик (измерительный преобразователь, чувствительный элемент)
- 24. Усилитель — элемент
- 25. Стабилизатор — элемент автоматики, обеспечивающий
- 26. Распределитель (шаговый искатель) —
- 27. ОБЩИЕ ХАРАКТЕРИСТИКИ
- 29. Величина, представляющая собой отношение относительного
- 30. При работе элементов выходная величина
- 31. Порогом чувствительности называется минимальная величина на

Слайд 2 Автоматика — это отрасль науки и техники, охватывающая теорию и
принципы построения систем управления техническими объектами и процессами, действующих без непосред-ственного участия человека.
Технический объект (станок, двигатель, летательный аппарат, поточная линия, автоматизи-рованный участок, цех и т. д.), нуждающийся в автоматическом или автоматизированном управлении, называется объектом управления (ОУ) или техническим объектом управления (ТОУ).
Совокупность ОУ и автоматического управляющего устройства называется системой автоматического управления (САУ) или автоматизированной системой управления (АСУ).
Ниже приведены наиболее широко используемые термины и их определения:
элемент - простейшая составная часть устройств, приборов и других средств, в которой осуществляется одно преобразование какой-либо величины;(мы в дальнейшем дадим более точное определение)
узел - часть прибора, состоящая из нескольких более простых элементов (деталей);
преобразователь - устройство, преобразующее один вид сигнала в другой по форме или виду энергии;
устройство - совокупность некоторого числа элементов, соединенных между собой соответствующим образом, служащая для переработки информации;
прибор - общее название широкого класса устройств, предназначенных для измерений, производственного контроля, вычислений, учета, сбыта и др.;
блок - часть прибора, представляющая собой совокупность функционально объединенных элементов.
Технический объект (станок, двигатель, летательный аппарат, поточная линия, автоматизи-рованный участок, цех и т. д.), нуждающийся в автоматическом или автоматизированном управлении, называется объектом управления (ОУ) или техническим объектом управления (ТОУ).
Совокупность ОУ и автоматического управляющего устройства называется системой автоматического управления (САУ) или автоматизированной системой управления (АСУ).
Ниже приведены наиболее широко используемые термины и их определения:
элемент - простейшая составная часть устройств, приборов и других средств, в которой осуществляется одно преобразование какой-либо величины;(мы в дальнейшем дадим более точное определение)
узел - часть прибора, состоящая из нескольких более простых элементов (деталей);
преобразователь - устройство, преобразующее один вид сигнала в другой по форме или виду энергии;
устройство - совокупность некоторого числа элементов, соединенных между собой соответствующим образом, служащая для переработки информации;
прибор - общее название широкого класса устройств, предназначенных для измерений, производственного контроля, вычислений, учета, сбыта и др.;
блок - часть прибора, представляющая собой совокупность функционально объединенных элементов.

Слайд 3 Любая система управления должна выполнять следующие функции:
сбор
информации о текущем состоянии технологического объекта управления (ОУ);
определение критериев качества работы ОУ;
нахождение оптимального режима функционирования ОУ и оптимальных управляющих воздействий, обеспечивающих экстремум критериев качества;
реализация найденного оптимального режима на ОУ.
Эти функции могут выполняться обслуживающим персоналом или ТСА.
Различают четыре типа систем управления (СУ):
информационные;
автоматического управления;
централизованного контроля и регулирования;
автоматизированные системы управления технологическими процессами.
определение критериев качества работы ОУ;
нахождение оптимального режима функционирования ОУ и оптимальных управляющих воздействий, обеспечивающих экстремум критериев качества;
реализация найденного оптимального режима на ОУ.
Эти функции могут выполняться обслуживающим персоналом или ТСА.
Различают четыре типа систем управления (СУ):
информационные;
автоматического управления;
централизованного контроля и регулирования;
автоматизированные системы управления технологическими процессами.

Слайд 5В САУ все функции выполняются автоматически при помощи соответствующих технических средств.
Функции оператора включают в себя:
- техническую диагностику состояния САУ и восстановление отказавших элементов системы;
- коррекцию законов регулирования;
- изменение задания;
- переход на ручное управление;
- техническое обслуживание оборудования.
- техническую диагностику состояния САУ и восстановление отказавших элементов системы;
- коррекцию законов регулирования;
- изменение задания;
- переход на ручное управление;
- техническое обслуживание оборудования.

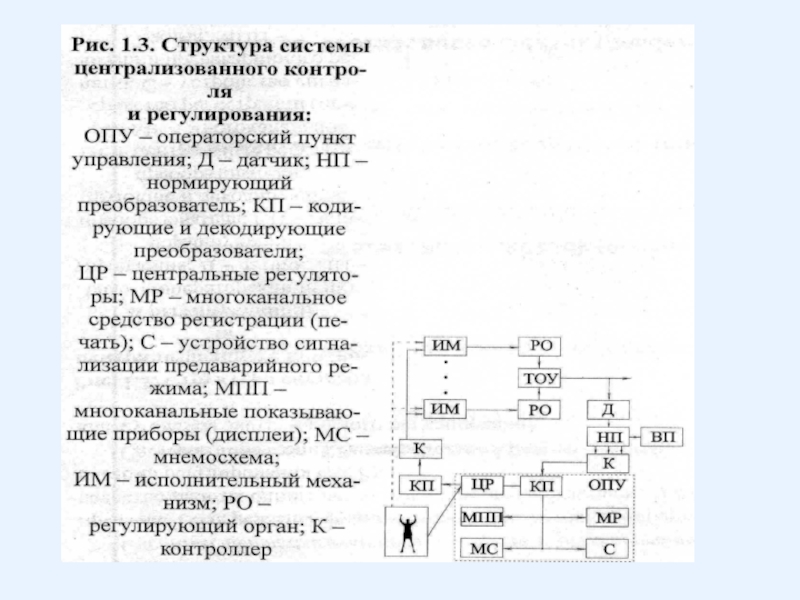
Слайд 8ОПУ - операторский пункт управления;
Д - датчик;
НП - нормирующий
преобразователь;
КП - кодирующие и декодирующие преобразователи;
ЦР - центральные регуляторы;
MP - многоканальное средство регистрации (печать);
С - устройство сигнализации предаварийного режима;
МПП - многоканальные показывающие приборы (дисплеи);
МС - мнемосхема;
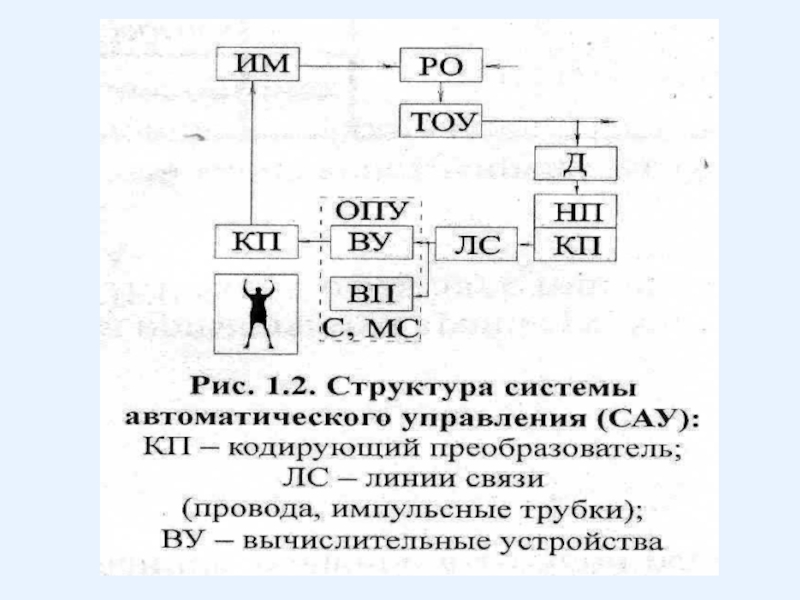
ИМ - исполнительный механизм;
РО - регулирующий орган;
К – контроллер.
КП - кодирующие и декодирующие преобразователи;
ЦР - центральные регуляторы;
MP - многоканальное средство регистрации (печать);
С - устройство сигнализации предаварийного режима;
МПП - многоканальные показывающие приборы (дисплеи);
МС - мнемосхема;
ИМ - исполнительный механизм;
РО - регулирующий орган;
К – контроллер.

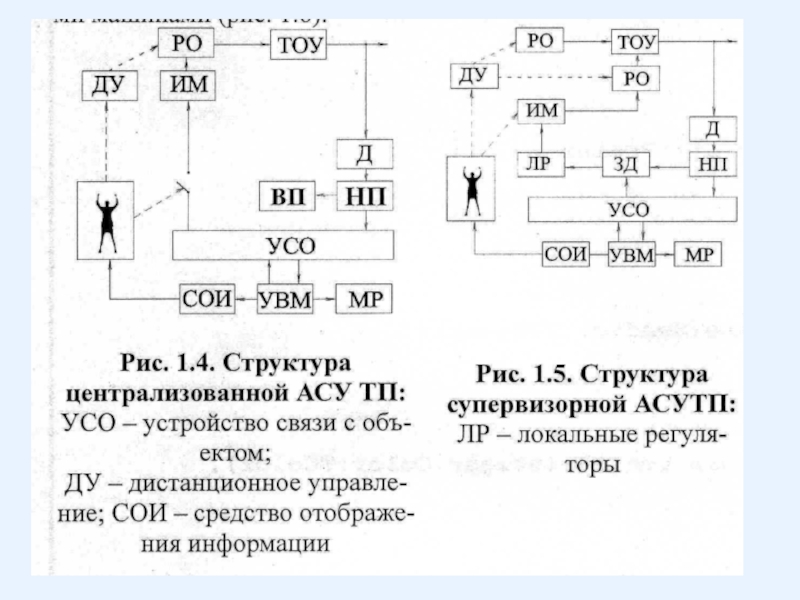
Слайд 9 Автоматизированные системы управления технологическими процессами (АСУТП) - это машинная система,
в которой ТСА осуществляют получение информации о состоянии объектов, вычисляют критерии качества, находят оптимальные настройки управления.
Функции оператора сводятся к анализу полученной информации и реализации с помощью локальных АСР или дистанционного управления РО.
Различают следующие типы АСУТП:
- централизованная АСУ ТП (все функции обработки информации и управления выполняет один компьютер ;
- супервизорная АСУТП (имеет ряд локальных АСР, построенных на базе ТСА индивидуального пользования и центральным компьютером, имеющим информационную линию связи с локальными системами) ;
- распределенная АСУТП - характеризуется разделением функций контроля обработки информации и управления между несколькими территориально распределенными объектами и компьютерами .
Функции оператора сводятся к анализу полученной информации и реализации с помощью локальных АСР или дистанционного управления РО.
Различают следующие типы АСУТП:
- централизованная АСУ ТП (все функции обработки информации и управления выполняет один компьютер ;
- супервизорная АСУТП (имеет ряд локальных АСР, построенных на базе ТСА индивидуального пользования и центральным компьютером, имеющим информационную линию связи с локальными системами) ;
- распределенная АСУТП - характеризуется разделением функций контроля обработки информации и управления между несколькими территориально распределенными объектами и компьютерами .
 - это машинная система, в которой ТСА осуществляют")
Слайд 11Типовые средства автоматизации могут быть:
техническими;
аппаратными;
программно-техническими;
общесистемными .

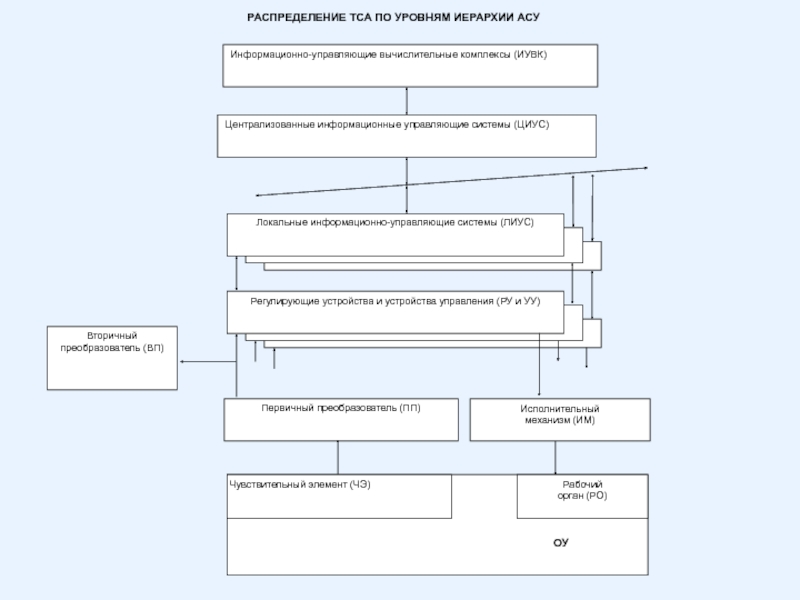
Слайд 13ИУВК: ЛВС, серверы, ERP-, MES-системы. Здесь реализуются все цели АСУП, вычисляется
себестоимость продукции, издержки на производство.
ЦИУС: промышленные компьютеры, пульты управления, управляющие комплексы, средства защиты и сигнализации.
ЛИУС: промышленные контроллеры, интеллектуальные контроллеры.
РУ и УУ: микроконтроллеры, регуляторы, регулирующие и сигнализирующие устройства.
ВП: показывающие, регистрирующие (вольтметры, амперметры, потенциометры, мосты), интегрирующие счетчики.
ИМ: двигатель, редуктор, электромагниты, электромагнитные муфты и пр.
ЧЭ: датчики тепло-технологических параметров, перемещения, скорости, ускорения.
РО: механическое устройство, изменяющее количество вещества или энергии, поступающей на ОУ, и несущее информацию об управляющем воздействии. РО могут быть вентили, клапаны, нагреватели, затворы, задвижки, заслонки.
ОУ: механизм, агрегат, процесс.
ЦИУС: промышленные компьютеры, пульты управления, управляющие комплексы, средства защиты и сигнализации.
ЛИУС: промышленные контроллеры, интеллектуальные контроллеры.
РУ и УУ: микроконтроллеры, регуляторы, регулирующие и сигнализирующие устройства.
ВП: показывающие, регистрирующие (вольтметры, амперметры, потенциометры, мосты), интегрирующие счетчики.
ИМ: двигатель, редуктор, электромагниты, электромагнитные муфты и пр.
ЧЭ: датчики тепло-технологических параметров, перемещения, скорости, ускорения.
РО: механическое устройство, изменяющее количество вещества или энергии, поступающей на ОУ, и несущее информацию об управляющем воздействии. РО могут быть вентили, клапаны, нагреватели, затворы, задвижки, заслонки.
ОУ: механизм, агрегат, процесс.

Слайд 14
К техническим средствам автоматизации (ТСА) относят:
датчики;
исполнительные механизмы;
регулирующие органы (РО);
линии связи;
вторичные приборы
(показывающие и регистрирующие);
устройства аналогового и цифрового регулирования;
программно-задающие блоки;
устройства логико-командного управления;
модули сбора и первичной обработки данных и контроля состояния технологического объекта управления (ТОУ);
модули гальванической развязки и нормализации сигналов;
преобразователи сигналов из одной формы в другую;
модули представления данных, индикации, регистрации и выработки сигналов управления;
буферные запоминающие устройства;
программируемые таймеры;
специализированные вычислительные устройства, устройства допроцессорной подготовки.
устройства аналогового и цифрового регулирования;
программно-задающие блоки;
устройства логико-командного управления;
модули сбора и первичной обработки данных и контроля состояния технологического объекта управления (ТОУ);
модули гальванической развязки и нормализации сигналов;
преобразователи сигналов из одной формы в другую;
модули представления данных, индикации, регистрации и выработки сигналов управления;
буферные запоминающие устройства;
программируемые таймеры;
специализированные вычислительные устройства, устройства допроцессорной подготовки.
 относят:датчики;исполнительные механизмы;регулирующие органы (РО);линии связи;вторичные приборы (показывающие и регистрирующие);устройства аналогового")
Слайд 15К программно-техническим средствам автоматизации относят:
аналого-цифровые и цифро-аналоговые преобразователи;
управляющие средства;
блоки многоконтурного, аналогового
и аналого-цифрового регулирования;
устройства многосвязного программного логического управления;
программируемые микроконтроллеры;
локально-вычислительные сети.
К общесистемным средствам автоматизации относят:
устройства сопряжения и адаптеры связи;
блоки общей памяти;
магистрали (шины);
устройства общесистемной диагностики;
процессоры прямого доступа для накопления информации;
пульты оператора.
устройства многосвязного программного логического управления;
программируемые микроконтроллеры;
локально-вычислительные сети.
К общесистемным средствам автоматизации относят:
устройства сопряжения и адаптеры связи;
блоки общей памяти;
магистрали (шины);
устройства общесистемной диагностики;
процессоры прямого доступа для накопления информации;
пульты оператора.

Слайд 16 В системах автоматического управления в качестве сигналов обычно используются
электрические и механические величины (например, постоянный ток, напряжение, давление сжатого газа или жидкости, усилие и т.п.), так как они позволяют легко осуществлять преобразование, сравнение, передачу на расстояние и хранение информации. В одних случаях сигналы возникают непосредственно вследствие протекающих при управлении процессов (изменения тока, напряжения, температуры, давления, наличия механических перемещений и т.д.), в других случаях они вырабатываются чувствительными элементами или датчиками.

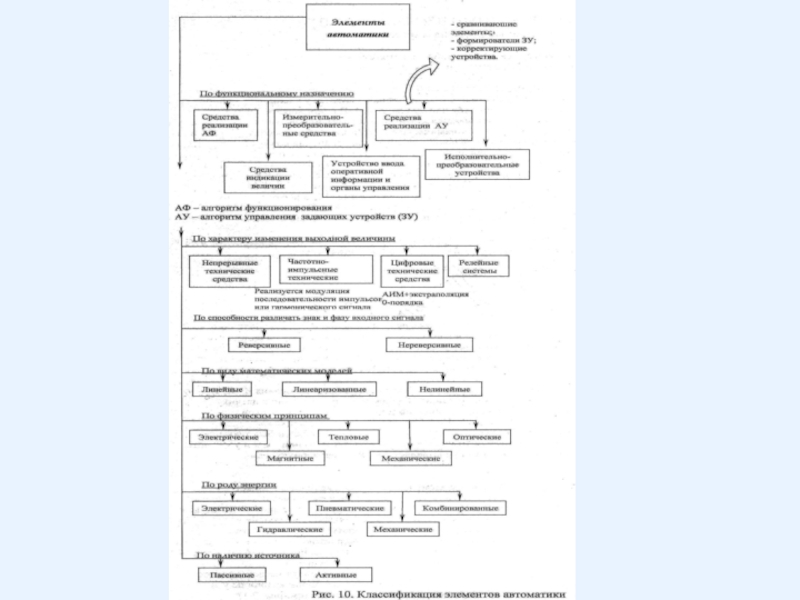
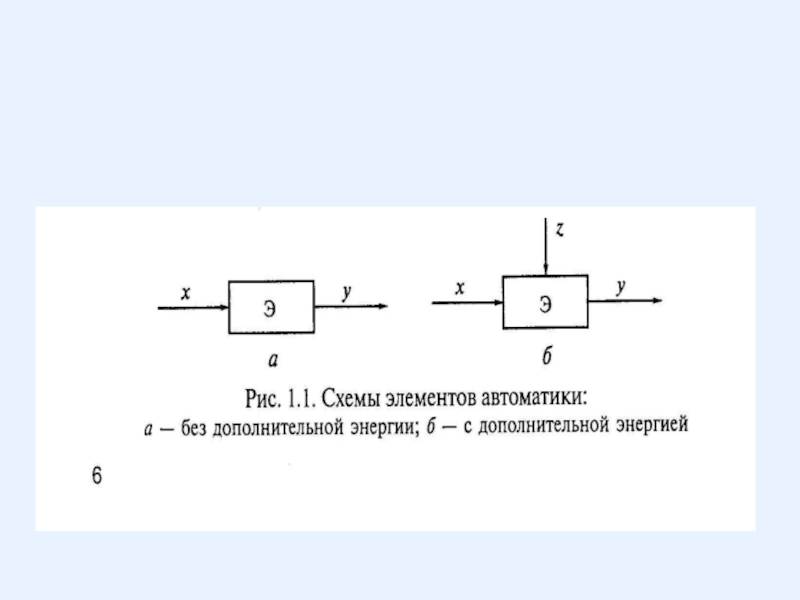
Слайд 17 Элементом автоматики называется простейшая конструктивно законченная в
функциональном отношении ячейка (устройство, схема), выполняющая определенную самостоятельную функцию преобразования сигнала (информации) в системах автоматического управления:
преобразование контролируемой величины в сигнал, функционально связанный с информацией об этой величине (чувствительные элементы, датчики);
преобразование сигнала одного рода энергии в сигнал другого рода энергии: электрической в неэлектрическую, неэлектрической в электрическую, неэлектрической в неэлектрическую (электромеханические, термоэлектрические, электропневматические, фотоэлектрические и другие преобразователи);
преобразование сигнала по значению энергии (усилители);
преобразование сигнала по виду, т.е. непрерывного в дискретный или обратно (аналогоцифровые, цифроаналоговые и другие преобразователи);
преобразование сигнала по форме, т.е. сигнала постоянного тока в сигнал переменного тока и наоборот (модуляторы, демодуляторы);
функциональное преобразование сигналов (счетно-решающие элементы, функциональные элементы);
сравнение сигналов и создание командного управляющего сигнала (элементы сравнения, нуль-органы);
выполнение логических операций с сигналами (логические элементы);
распределение сигналов по различным цепям (распределители, коммутаторы);
хранение сигналов (элементы памяти, накопители);
использование сигналов для воздействия на управляемый процесс (исполнительные элементы).
преобразование контролируемой величины в сигнал, функционально связанный с информацией об этой величине (чувствительные элементы, датчики);
преобразование сигнала одного рода энергии в сигнал другого рода энергии: электрической в неэлектрическую, неэлектрической в электрическую, неэлектрической в неэлектрическую (электромеханические, термоэлектрические, электропневматические, фотоэлектрические и другие преобразователи);
преобразование сигнала по значению энергии (усилители);
преобразование сигнала по виду, т.е. непрерывного в дискретный или обратно (аналогоцифровые, цифроаналоговые и другие преобразователи);
преобразование сигнала по форме, т.е. сигнала постоянного тока в сигнал переменного тока и наоборот (модуляторы, демодуляторы);
функциональное преобразование сигналов (счетно-решающие элементы, функциональные элементы);
сравнение сигналов и создание командного управляющего сигнала (элементы сравнения, нуль-органы);
выполнение логических операций с сигналами (логические элементы);
распределение сигналов по различным цепям (распределители, коммутаторы);
хранение сигналов (элементы памяти, накопители);
использование сигналов для воздействия на управляемый процесс (исполнительные элементы).
, выполняющая")
Слайд 20 Комплексы различных технических устройств и элементов, входящих в
состав системы управления и соединенных электрическими, механическими и другими связями, на чертежах изображают в виде различных схем:
электрических, гидравлических, пневматических и кинематических.
Схема служит для получения концентрированного и достаточно полного представления о составе и связях любого устройства или системы.
Согласно Единой системе конструкторской документации (ЕСКД) и ГОСТ 2.701 электрические схемы подразделяют на структурные, функциональные, принципиальные (полные), схемы соединений (монтажные), подключения, общие, расположения и объединенные.
Структурная схема служит для определения функциональных частей, их назначения и взаимосвязей.
Функциональная схема предназначена для определения характера процессов, протекающих в отдельных функциональных цепях или установке в целом.
Принципиальная схема, показывающая полный состав элементов установки в целом и все связи между ними, дает основное представление о принципах работы соответствующей установки.
Монтажная схема иллюстрирует соединение составных частей установки с помощью проводов, кабелей, трубопроводов.
Схема подключения показывает внешние подключения установки или изделия.
Общая схема служит для определения составных частей комплекса и способов их соединения на месте эксплуатации.
Объединенная схема включает в себя несколько схем разных видов в целях более ясного раскрытия содержания и связей элементов установки.
электрических, гидравлических, пневматических и кинематических.
Схема служит для получения концентрированного и достаточно полного представления о составе и связях любого устройства или системы.
Согласно Единой системе конструкторской документации (ЕСКД) и ГОСТ 2.701 электрические схемы подразделяют на структурные, функциональные, принципиальные (полные), схемы соединений (монтажные), подключения, общие, расположения и объединенные.
Структурная схема служит для определения функциональных частей, их назначения и взаимосвязей.
Функциональная схема предназначена для определения характера процессов, протекающих в отдельных функциональных цепях или установке в целом.
Принципиальная схема, показывающая полный состав элементов установки в целом и все связи между ними, дает основное представление о принципах работы соответствующей установки.
Монтажная схема иллюстрирует соединение составных частей установки с помощью проводов, кабелей, трубопроводов.
Схема подключения показывает внешние подключения установки или изделия.
Общая схема служит для определения составных частей комплекса и способов их соединения на месте эксплуатации.
Объединенная схема включает в себя несколько схем разных видов в целях более ясного раскрытия содержания и связей элементов установки.

Слайд 21Обозначим через y(t) функцию, описывающую изменение во времени регулируемой величины, т.
е. у(t) — регулируемая величина.
Через g(t) обозначим функцию, характеризующую требуемый закон ее изменения.
Величину g(t) будем называть задающим воздействием.
Тогда основная задача автоматического регулирования сводится к обеспечению равенства y(t)=g(t). Регулируемая величина y(t) измеряется с помощью датчика Д и поступает на элемент сравнения (ЭС).
На этот же элемент сравнения от датчика задания (ДЗ) поступает задающее воздействие g(t).
В ЭС величины g(t) и y(t) сравниваются, т. е. из g(t) вычитается у (t). На выходе ЭС формируется сигнал, равный отклонению регулируемой величины от заданной, т. е. ошибка
∆ = g(t) – y(t). Этот сигнал поступает на усилитель (У) и затем подается на исполнительный элемент (ИЭ), который и оказывает регулирующее воздействие на объект регулирования (ОР). Это воздействие будет изменяться до тех пор, пока регулируемая величина у (t) не станет равна заданной g(t).
На объект регулирования постоянно влияют различные возмущающие воздействия:
нагрузка объекта, внешние факторы и др.
Эти возмущающие воздействия стремятся изменить величину y(t).
Но САР постоянно определяет отклонение y(t) от g(t) и формирует управляющий сигнал, стремящийся свести это отклонение к нулю.
Через g(t) обозначим функцию, характеризующую требуемый закон ее изменения.
Величину g(t) будем называть задающим воздействием.
Тогда основная задача автоматического регулирования сводится к обеспечению равенства y(t)=g(t). Регулируемая величина y(t) измеряется с помощью датчика Д и поступает на элемент сравнения (ЭС).
На этот же элемент сравнения от датчика задания (ДЗ) поступает задающее воздействие g(t).
В ЭС величины g(t) и y(t) сравниваются, т. е. из g(t) вычитается у (t). На выходе ЭС формируется сигнал, равный отклонению регулируемой величины от заданной, т. е. ошибка
∆ = g(t) – y(t). Этот сигнал поступает на усилитель (У) и затем подается на исполнительный элемент (ИЭ), который и оказывает регулирующее воздействие на объект регулирования (ОР). Это воздействие будет изменяться до тех пор, пока регулируемая величина у (t) не станет равна заданной g(t).
На объект регулирования постоянно влияют различные возмущающие воздействия:
нагрузка объекта, внешние факторы и др.
Эти возмущающие воздействия стремятся изменить величину y(t).
Но САР постоянно определяет отклонение y(t) от g(t) и формирует управляющий сигнал, стремящийся свести это отклонение к нулю.
 функцию, описывающую изменение во времени регулируемой величины, т. е. у(t) — регулируемая")
Слайд 22 По выполняемым функциям основные элементы автоматики делятся на датчики,
усилители, стабилизаторы, реле, распределители, двигатели и другие узлы (генераторы импульсов, логические элементы, выпрямители и т.д.).
По роду физических процессов, используемых в основе устройств, элементы автоматики делятся на электрические, ферромагнитные, электротепловые, электромашинные, радиоактивные, электронные, ионные и др.
По роду физических процессов, используемых в основе устройств, элементы автоматики делятся на электрические, ферромагнитные, электротепловые, электромашинные, радиоактивные, электронные, ионные и др.

Слайд 23
Датчик (измерительный преобразователь, чувствительный элемент) — устройство, предназначенное для того, чтобы
информацию, поступающую на его вход в виде некоторой физической величины, функционально преобразовать в другую физическую величину на выходе, более удобную для воздействия на последующие элементы (блоки).
 — устройство, предназначенное для того, чтобы информацию, поступающую на его")
Слайд 24
Усилитель — элемент автоматики, осуществляющий количественное преобразование (чаще всего усиление) поступающей
на его вход физической величины (тока, мощности, напряжения, давления и т.п.).
 поступающей на его вход физической")
Слайд 25
Стабилизатор — элемент автоматики, обеспечивающий постоянство выходной величины у при колебаниях
входной величины х в определенных пределах.
Реле — элемент автоматики, в котором при достижении входной величины х определенного значения выходная величина у изменяется скачком.
Реле — элемент автоматики, в котором при достижении входной величины х определенного значения выходная величина у изменяется скачком.

Слайд 26
Распределитель (шаговый искатель) — элемент автоматики, осуществляющий поочередное подключение одной
величины к ряду цепей.
Исполнительные устройства — электромагниты с втяжным и поворотным якорями, электромагнитные муфты, а также электродвигатели, относящиеся к электромеханическим исполнительным элементам автоматических устройств.
Электродвигатель — это устройство, обеспечивающее преобразование электрической энергии в механическую и преодолевающее при этом значительное механическое сопротивление со стороны перемещаемых устройств.
Исполнительные устройства — электромагниты с втяжным и поворотным якорями, электромагнитные муфты, а также электродвигатели, относящиеся к электромеханическим исполнительным элементам автоматических устройств.
Электродвигатель — это устройство, обеспечивающее преобразование электрической энергии в механическую и преодолевающее при этом значительное механическое сопротивление со стороны перемещаемых устройств.
 — элемент автоматики, осуществляющий поочередное подключение одной величины к ряду цепей.")
Слайд 27 ОБЩИЕ ХАРАКТЕРИСТИКИ ЭЛЕМЕНТОВ АВТОМАТИКИ
Основные понятия и определения
Каждый из элементов характеризуется какими-либо свойствами, которые определяются соответствующими характеристиками. Некоторые из этих характеристик являются общими для большинства элементов.
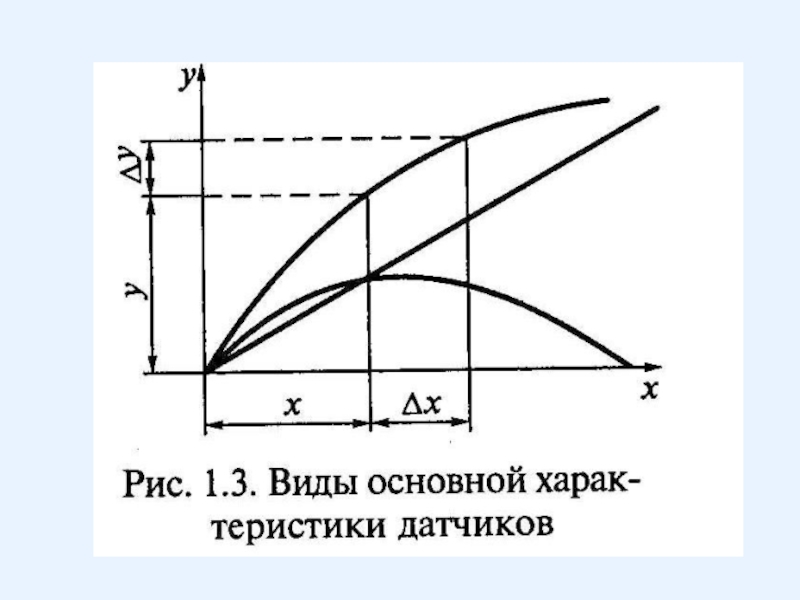
Главной общей характеристикой элементов является коэффициент преобразования (или коэффициент передачи, представляющий собой отношение выходной величины элемента у к входной величине х, или отношение приращения выходной величины ∆у или dy к приращению входной величины ∆х или dx.
В первом случае К=у/х называется статическим коэффициентом преобразования, а во втором случае К' = ∆у/∆х≈ dy/dx при ∆х →0 — динамическим коэффициентом преобразования.
Связь между значениями х и у определяется функциональной зависимостью; значения коэффициентов К и К' зависят от формы характеристики элемента или вида функции у =f(х), а также от того, при каких значениях величин подсчитываются К и К'. В большинстве случаев выходная величина изменяется пропорционально входной и коэффициенты преобразования равны между собой, т.е. К= К' = const.
Каждый из элементов характеризуется какими-либо свойствами, которые определяются соответствующими характеристиками. Некоторые из этих характеристик являются общими для большинства элементов.
Главной общей характеристикой элементов является коэффициент преобразования (или коэффициент передачи, представляющий собой отношение выходной величины элемента у к входной величине х, или отношение приращения выходной величины ∆у или dy к приращению входной величины ∆х или dx.
В первом случае К=у/х называется статическим коэффициентом преобразования, а во втором случае К' = ∆у/∆х≈ dy/dx при ∆х →0 — динамическим коэффициентом преобразования.
Связь между значениями х и у определяется функциональной зависимостью; значения коэффициентов К и К' зависят от формы характеристики элемента или вида функции у =f(х), а также от того, при каких значениях величин подсчитываются К и К'. В большинстве случаев выходная величина изменяется пропорционально входной и коэффициенты преобразования равны между собой, т.е. К= К' = const.

Слайд 29 Величина, представляющая собой отношение относительного приращения выходной величины ∆у/у
к относительному приращению входной величины ∆х/х, называется относительным коэффициентом преобразования η∆ .
Например, если изменение входной величины на 2 % вызывает изменение выходной величины на
3 %, то относительный коэффициент преобразования η∆ = 1,5.
Применительно к различным элементам автоматики коэффициенты преобразования К', К, η∆ и η имеют определенный физический смысл и свое название. Например, применительно к датчику коэффициент преобразования называется чувствительностью (статической, динамической, относительной); желательно, чтобы она была как можно больше. Для усилителей коэффициент преобразования принято называть коэффициентом усиления; желательно, чтобы он был также как можно больше. Для большинства усилителей (в том числе и электрических) величины х и у являются однородными, и поэтому коэффициент усиления представляет собой безразмерную величину.
Например, если изменение входной величины на 2 % вызывает изменение выходной величины на
3 %, то относительный коэффициент преобразования η∆ = 1,5.
Применительно к различным элементам автоматики коэффициенты преобразования К', К, η∆ и η имеют определенный физический смысл и свое название. Например, применительно к датчику коэффициент преобразования называется чувствительностью (статической, динамической, относительной); желательно, чтобы она была как можно больше. Для усилителей коэффициент преобразования принято называть коэффициентом усиления; желательно, чтобы он был также как можно больше. Для большинства усилителей (в том числе и электрических) величины х и у являются однородными, и поэтому коэффициент усиления представляет собой безразмерную величину.

Слайд 30 При работе элементов выходная величина у может отклоняться от
требуемого значения за счет изменения их внутренних свойств (износа, старения материалов и т.п.) или за счет изменения внешних факторов (колебания напряжения питания, окружающей температуры и др.), при этом происходит изменение характеристики элемента (кривая у' на рис. 2.1). Это отклонение называется погрешностью, которая может быть абсолютной и относительной.
Абсолютной погрешностью (ошибкой) называется разность между полученным значением выходной величины у' и расчетным (желаемым) ее значением ∆у = у'- у.
Относительной погрешностью называется отношение абсолютной погрешности ∆у к номинальному (расчетному) значению выходной величины у. В процентах относительная погрешность определяется как γ = ∆ у • 100/у.
В зависимости от причин, вызывающих отклонение, различают температурную, частотную, токовую и другие погрешности.
Иногда пользуются приведенной погрешностью, под которой понимается отношение абсолютной погрешности к наибольшему значению выходной величины. В процентах приведенная погрешность
γприв = ∆y • 100/уmax
Если абсолютная погрешность постоянна, то приведенная погрешность также постоянна.
Погрешность, вызванная изменением характеристик элемента со временем, называется нестабильностью элемента.
Абсолютной погрешностью (ошибкой) называется разность между полученным значением выходной величины у' и расчетным (желаемым) ее значением ∆у = у'- у.
Относительной погрешностью называется отношение абсолютной погрешности ∆у к номинальному (расчетному) значению выходной величины у. В процентах относительная погрешность определяется как γ = ∆ у • 100/у.
В зависимости от причин, вызывающих отклонение, различают температурную, частотную, токовую и другие погрешности.
Иногда пользуются приведенной погрешностью, под которой понимается отношение абсолютной погрешности к наибольшему значению выходной величины. В процентах приведенная погрешность
γприв = ∆y • 100/уmax
Если абсолютная погрешность постоянна, то приведенная погрешность также постоянна.
Погрешность, вызванная изменением характеристик элемента со временем, называется нестабильностью элемента.

Слайд 31 Порогом чувствительности называется минимальная величина на входе элемента, которая вызывает
изменение выходной величины (т.е. уверенно обнаруживается с помощью данного датчика). Появление порога чувствительности вызывают как внешние, так и внутренние факторы (трение, люфты, гистерезис, внутренние шумы, помехи и др.).
При наличии релейных свойств характеристика элемента может приобретать реверсивный характер . В этом случае она также обладает порогом чувствительности и зоной нечувствительности.
При наличии релейных свойств характеристика элемента может приобретать реверсивный характер . В этом случае она также обладает порогом чувствительности и зоной нечувствительности.

Слайд 32
Динамический режим работы элементов.
Динамическим режимом называется процесс перехода элементов и систем из одного установившегося состояния в другое, т.е. такое условие их работы, когда входная величина х, а следовательно, и выходная величина у изменяются во времени. Процесс изменения величин х и у начинается с некоторого порогового времени t = tп и может протекать в инерционном и безинерционном режимах.
При наличии инерционности наблюдается запаздывание изменения у по отношению к изменению х. Тогда при скачкообразном изменении входной величины от 0 до х0 выходная величина у достигает установившегося Yуст не сразу, а по истечении промежутка времени, в течение которого происходит переходный процесс. При этом переходный процесс может быть апериодическим (неколебатель-ным) затухающим или колебательным затухающим .Время tуст(время установления), в течение которого выходная величина у достигает установившегося значения, зависит от инерционности элемента, характеризуемой постоянной времени Т.
В простейшем случае установление величины у происходит по показательному закону:
где Т — постоянная времени элемента, зависящая от параметров, связанных с его инерционностью.
Установление выходной величины у тем продолжительнее, чем больше значение Т. Время устано-вления tycт выбирается в зависимости от необходимой точности измерения датчика и составляет обычно (3... 5) Т, что дает ошибку в динамическом режиме не более 5... 1 %. Степень приближения ∆у обычно оговаривается и в большинстве случаев составляет от 1 до 10 % от установившегося значения. Разность между значениями выходной величины в динамическом и статическом режимах называ-ется динамической погрешностью. Желательно, чтобы она была как можно меньше. В электроме-ханических и электромашинных элементах инерционность в основном определяется механической инерцией движущихся и вращающихся частей. В электрических элементах инерционность определяется электромагнитной инерцией или другими подобными факторами. Инерционность может быть причиной нарушения устойчивой работы элемента или системы в целом.
Динамическим режимом называется процесс перехода элементов и систем из одного установившегося состояния в другое, т.е. такое условие их работы, когда входная величина х, а следовательно, и выходная величина у изменяются во времени. Процесс изменения величин х и у начинается с некоторого порогового времени t = tп и может протекать в инерционном и безинерционном режимах.
При наличии инерционности наблюдается запаздывание изменения у по отношению к изменению х. Тогда при скачкообразном изменении входной величины от 0 до х0 выходная величина у достигает установившегося Yуст не сразу, а по истечении промежутка времени, в течение которого происходит переходный процесс. При этом переходный процесс может быть апериодическим (неколебатель-ным) затухающим или колебательным затухающим .Время tуст(время установления), в течение которого выходная величина у достигает установившегося значения, зависит от инерционности элемента, характеризуемой постоянной времени Т.
В простейшем случае установление величины у происходит по показательному закону:
где Т — постоянная времени элемента, зависящая от параметров, связанных с его инерционностью.
Установление выходной величины у тем продолжительнее, чем больше значение Т. Время устано-вления tycт выбирается в зависимости от необходимой точности измерения датчика и составляет обычно (3... 5) Т, что дает ошибку в динамическом режиме не более 5... 1 %. Степень приближения ∆у обычно оговаривается и в большинстве случаев составляет от 1 до 10 % от установившегося значения. Разность между значениями выходной величины в динамическом и статическом режимах называ-ется динамической погрешностью. Желательно, чтобы она была как можно меньше. В электроме-ханических и электромашинных элементах инерционность в основном определяется механической инерцией движущихся и вращающихся частей. В электрических элементах инерционность определяется электромагнитной инерцией или другими подобными факторами. Инерционность может быть причиной нарушения устойчивой работы элемента или системы в целом.