- Главная
- Разное
- Дизайн
- Бизнес и предпринимательство
- Аналитика
- Образование
- Развлечения
- Красота и здоровье
- Финансы
- Государство
- Путешествия
- Спорт
- Недвижимость
- Армия
- Графика
- Культурология
- Еда и кулинария
- Лингвистика
- Английский язык
- Астрономия
- Алгебра
- Биология
- География
- Детские презентации
- Информатика
- История
- Литература
- Маркетинг
- Математика
- Медицина
- Менеджмент
- Музыка
- МХК
- Немецкий язык
- ОБЖ
- Обществознание
- Окружающий мир
- Педагогика
- Русский язык
- Технология
- Физика
- Философия
- Химия
- Шаблоны, картинки для презентаций
- Экология
- Экономика
- Юриспруденция
Конструкции и принципы работы микромеханических приборов. Гироскопы презентация
Содержание
- 1. Конструкции и принципы работы микромеханических приборов. Гироскопы
- 2. Гироско́п (от др.-греч. γῦρος — круг + σκοπέω — смотрю) — устройство, способное реагировать на изменение углов ориентации тела,
- 3. Основные определения Микромеханические, или микрогироскопы (МГ), являются
- 4. Классификационные признаки микрогироскопов Число измерительных осей Число
- 5. Основные определения
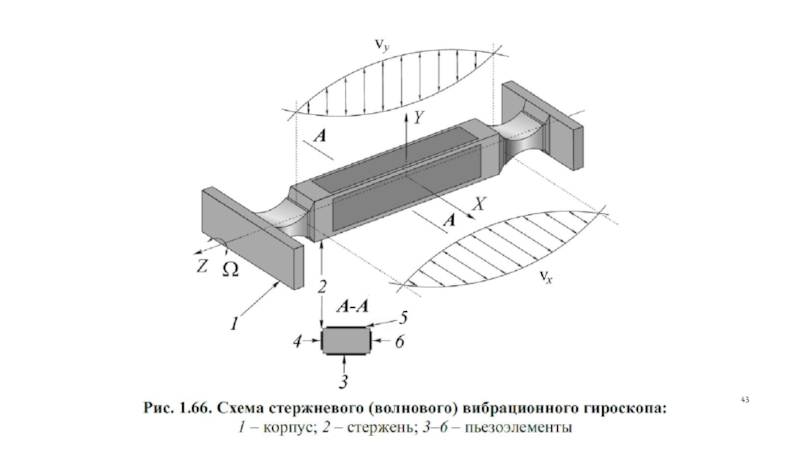
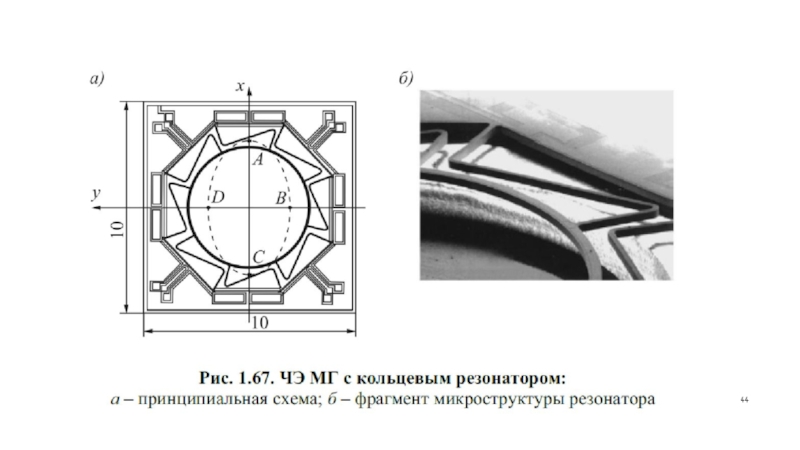
- 6. Основные определения МГ камертонные и волновые
- 7. Основные определения МГ камертонные и волновые
- 8. Основные определения Типовые характеристиками МГ Диапазон измерений
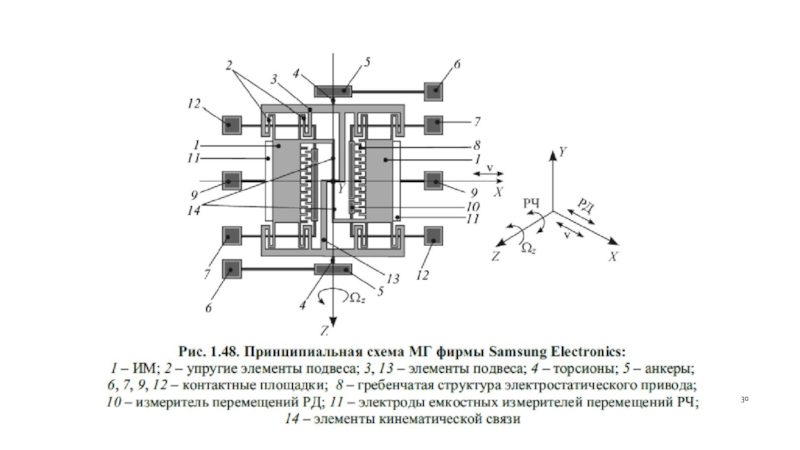
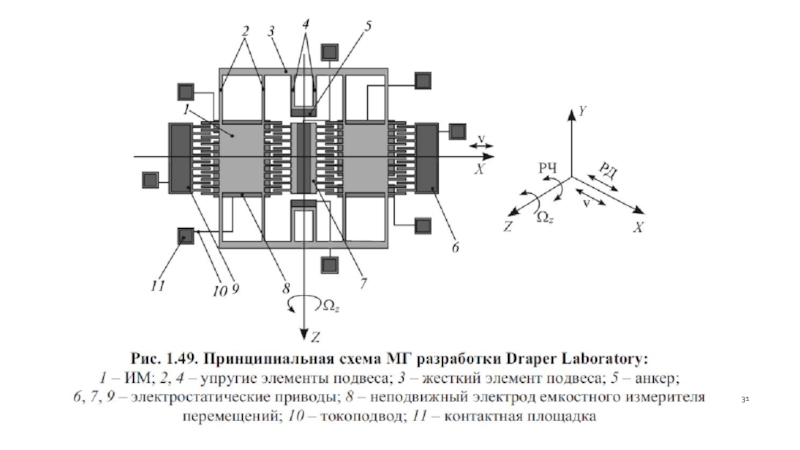
- 9. Микрогироскопы LL-типа Одномассовые микрогироскопы
- 10. Микрогироскопы LL-типа Одномассовые микрогироскопы
- 11. Микрогироскопы LL-типа
- 12. Микрогироскопы LL-типа
- 14. Микрогироскопы LL-типа
- 24. Двухмассовые микрогироскопы Микрогироскопы LL-типа
- 27. Микрогироскопы LR-типа
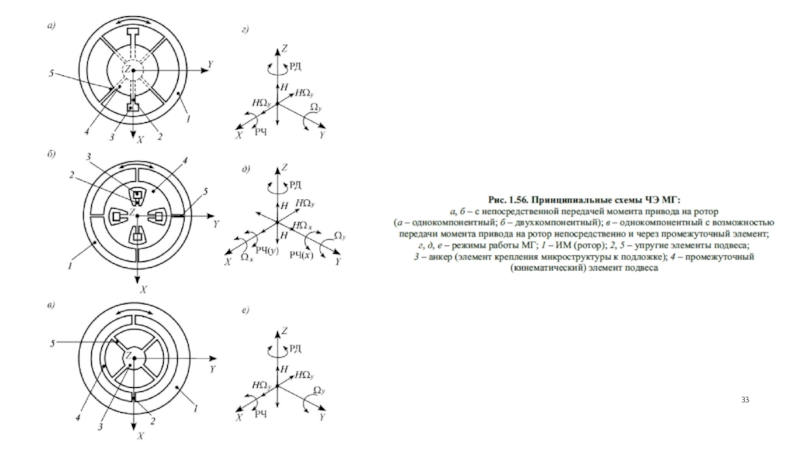
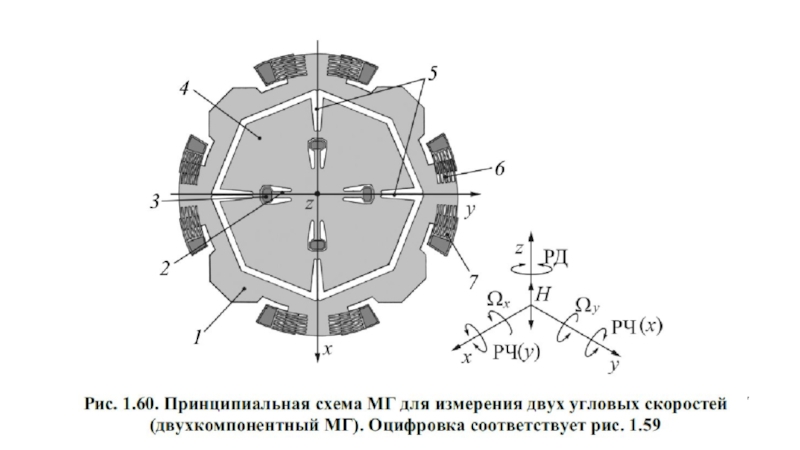
- 32. Микрогироскопы RR-типа
- 34. Конструкция микрогироскопов
- 35. Конструкция микрогироскопов
- 40. Камертонные и волновые микрогироскопы

Слайд 2
Гироско́п (от др.-греч. γῦρος — круг + σκοπέω — смотрю) — устройство, способное реагировать на изменение углов ориентации тела, на котором оно установлено, относительноинерциальной
системы отсчета. Простейший пример гироскопа — юла (волчок).
Термин впервые введен Ж. Фуко в его докладе в 1852 году во Французской Академии Наук. Доклад был посвящён способам экспериментального обнаружения вращения Земли винерциальном пространстве. Этим и обусловлено название «гироскоп».
Термин впервые введен Ж. Фуко в его докладе в 1852 году во Французской Академии Наук. Доклад был посвящён способам экспериментального обнаружения вращения Земли винерциальном пространстве. Этим и обусловлено название «гироскоп».
 — устройство, способное реагировать на изменение углов ориентации тела, на котором оно установлено, относительноинерциальной системы отсчета. Простейший пример")
Слайд 3Основные определения
Микромеханические, или микрогироскопы (МГ), являются электромеханическими системами, в которых энергия
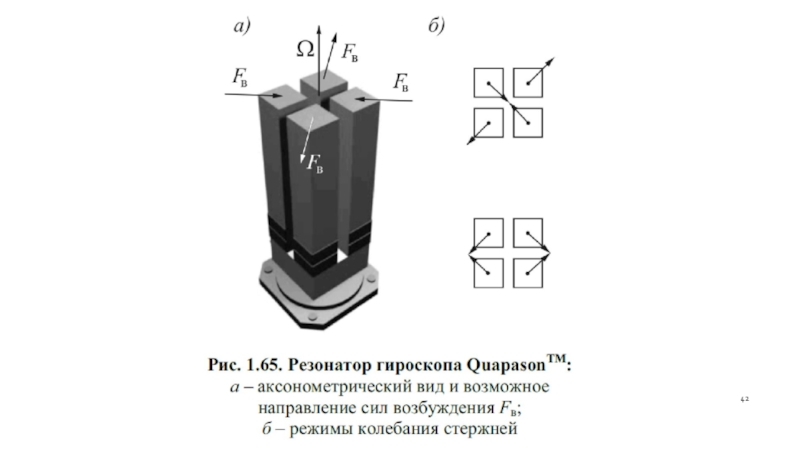
вынужденных (первичных) колебаний инерционной массы (ИМ) на упругом подвесе (резонатор) при появлении переносной угловой скорости преобразуется в энергию вторичных колебаний, которые содержат информацию об измеряемой угловой скорости.
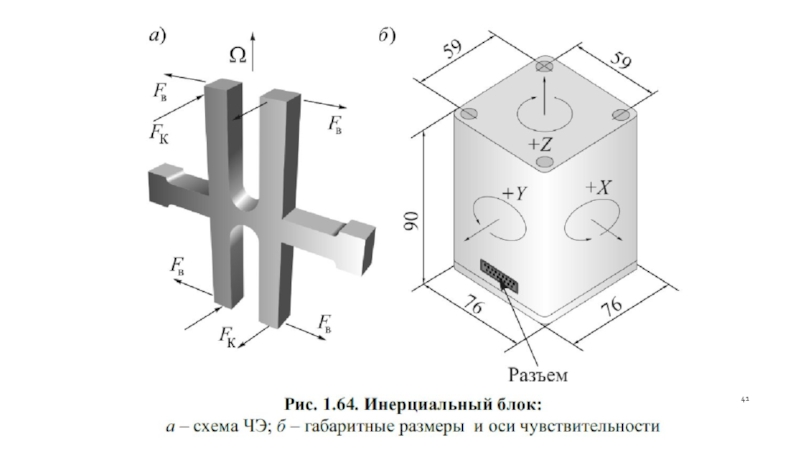
Преобразование осуществляется вследствие воздействия на резонатор сил (или моментов) инерции Кориолиса при вращении резонатора с переносной угловой скоростью, вектор которой перпендикулярен к вектору количества движения, или момента количества движения (кинетического момента), соответственно для поступательных или вращательных первичных колебаний ИМ.
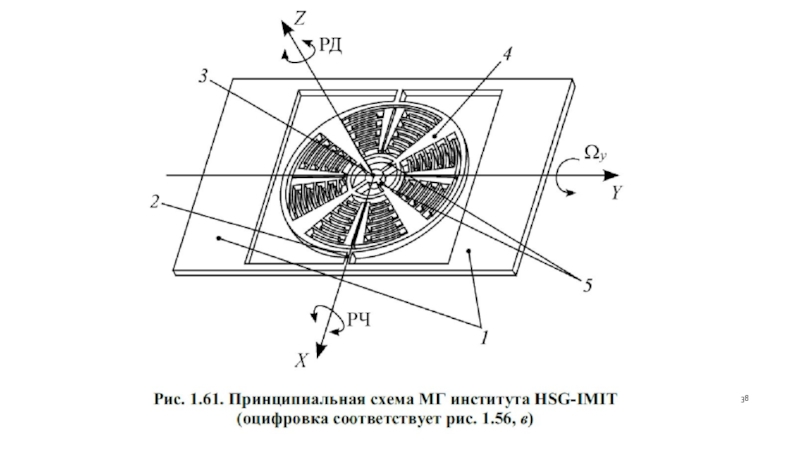
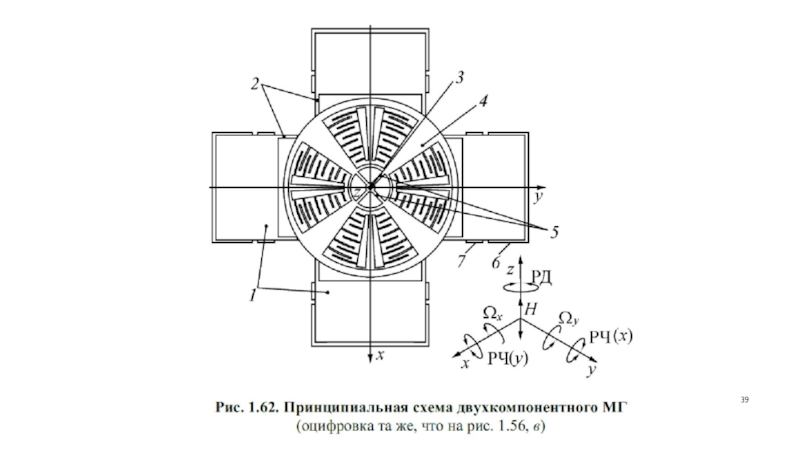
Первичные колебания называют также режимом движения (РД), или движением по координате возбуждения, а вторичные – режимом чувствительности (РЧ), или движением по координате выходного сигнала.
, являются электромеханическими системами, в которых энергия вынужденных (первичных) колебаний инерционной")
Слайд 4Классификационные признаки микрогироскопов
Число измерительных осей
Число инерционных масс
Тип подвеса
Наличие кинематических связей
Вид перемещения
ИМ
Тип привода (обратные преобразователи)
Тип датчика съема сигнала (обратные преобразователи).
Тип привода (обратные преобразователи)
Тип датчика съема сигнала (обратные преобразователи).
Основные определения
Тип")



Слайд 8Основные определения
Типовые характеристиками МГ
Диапазон измерений
Чувствительность
Полоса пропускания частот
Масштабный коэффициент и
его стабильность
Перекрестная чувствительность
Шум
Температурная стабильность характеристик
И другие эксплуатационные параметры и характеристики.
Перекрестная чувствительность
Шум
Температурная стабильность характеристик
И другие эксплуатационные параметры и характеристики.