ции исполнительного элемента выполняет силовой контроллер, при помощи кото-
рого осуществляют переключение позиций силовой схемы.
Силовой контроллер, получив сигнал о переходе на новую позицию, отрабатывает его через время τ. Поэтому при разработке систем управления силовым контроллером он мо-жет рассматриваться как звено запаздывания с передаточной функцией W(p)=epτ. Это на-кладывает ограничение на время Ту между сменой сигнала управления Ту≥τ.
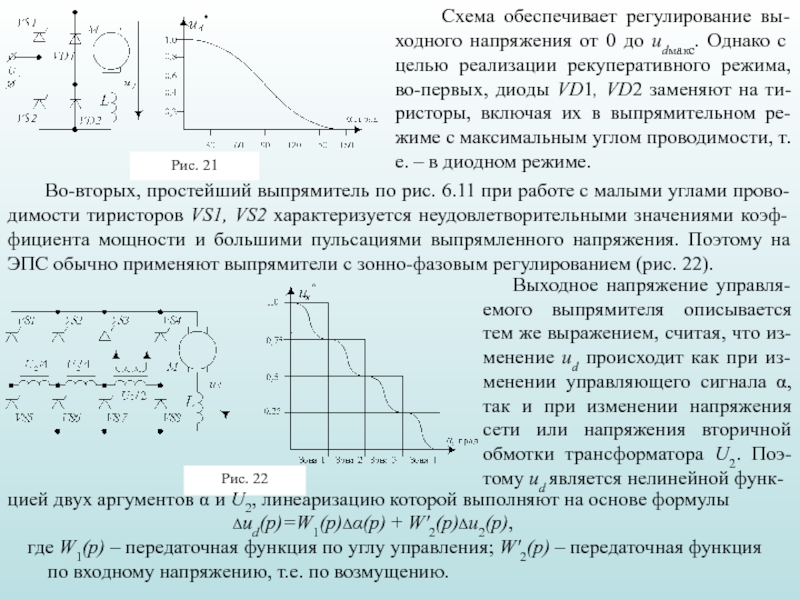
На грузовых электровозах применение автоматики предпочтительно при использова-нии исполнительных элементов, обеспечивающих плавное экономичное управление рабо-той тяговых двигателей. На ЭПС переменного тока основным исполнительным элементом является управляемый выпрямитель, который может быть выполнен по диодно-тиристор-ной схеме (рис. 21) со статической характеристикой для относительного значения вы-прямленного напряжения иd*= иd / иdмакс:
где – коэффициент, значение которого определяется для мостовой
схемы выпрямителя; U2 – действующее значение переменного напряжения на вен-
тильной обмотке.


 является обратной по отношению кривой намагничивания Ф= F(Fв).Завершением этого процесса является запирание")

")
 где iд– ток тягового двигателя; rср – сопротивление сглаживающего реактора; rд – сопро-")

 Уравнения для Δик и Δi1 получены линеаризацией по формуле полного дифференциала. Эти же")
 Выражения передаточных функций по напряжению и")

мин, а не с нуля. Необходимое значение kмин")

. Гальваническим разделением")
 – это усилитель в режиме нуль-органа, сравниваю-щий напряжение")