- Главная
- Разное
- Дизайн
- Бизнес и предпринимательство
- Аналитика
- Образование
- Развлечения
- Красота и здоровье
- Финансы
- Государство
- Путешествия
- Спорт
- Недвижимость
- Армия
- Графика
- Культурология
- Еда и кулинария
- Лингвистика
- Английский язык
- Астрономия
- Алгебра
- Биология
- География
- Детские презентации
- Информатика
- История
- Литература
- Маркетинг
- Математика
- Медицина
- Менеджмент
- Музыка
- МХК
- Немецкий язык
- ОБЖ
- Обществознание
- Окружающий мир
- Педагогика
- Русский язык
- Технология
- Физика
- Философия
- Химия
- Шаблоны, картинки для презентаций
- Экология
- Экономика
- Юриспруденция
Робот исследователь EV3 презентация
Содержание
- 2. EV3 Мастер класс «Робот исследователь»
- 3. Правила Соблюдаем тишину, когда преподаватель говорит
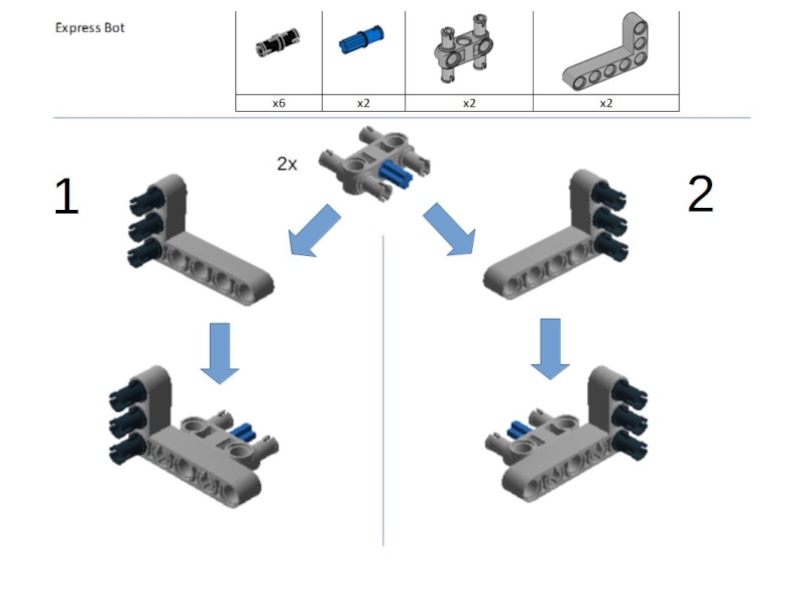
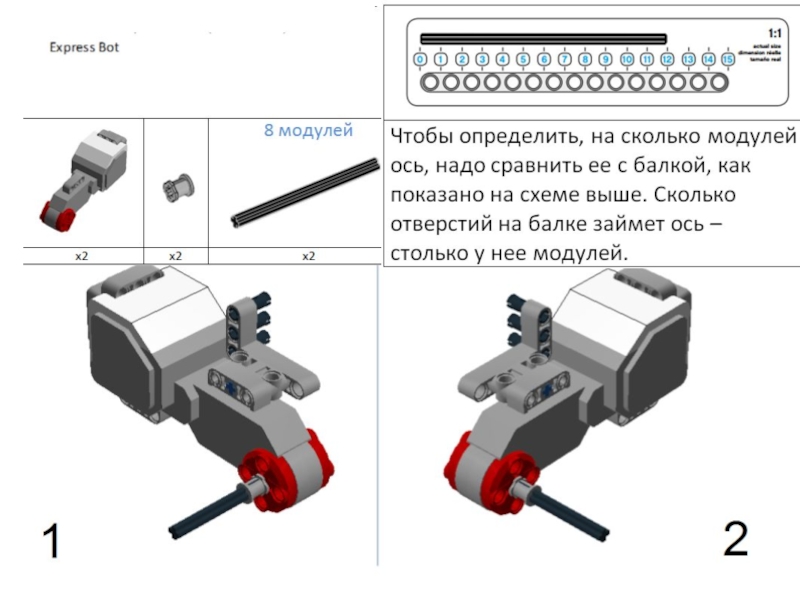
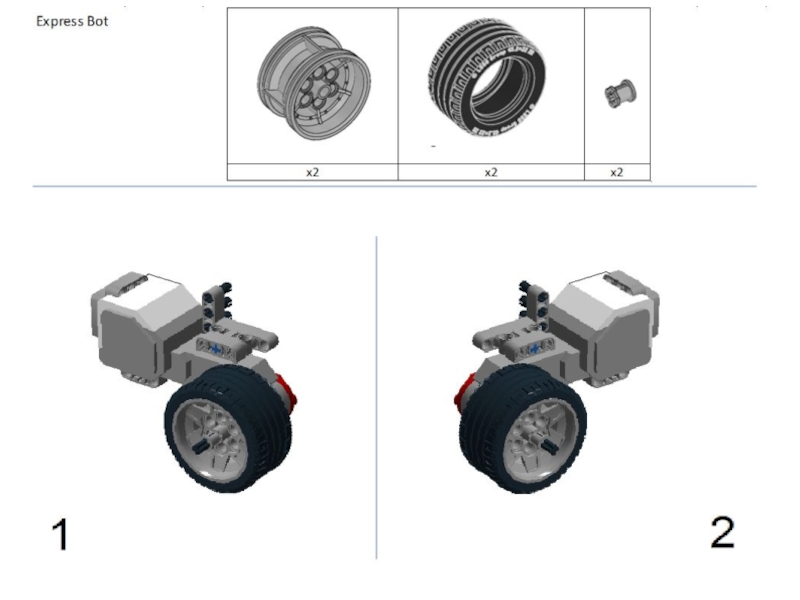
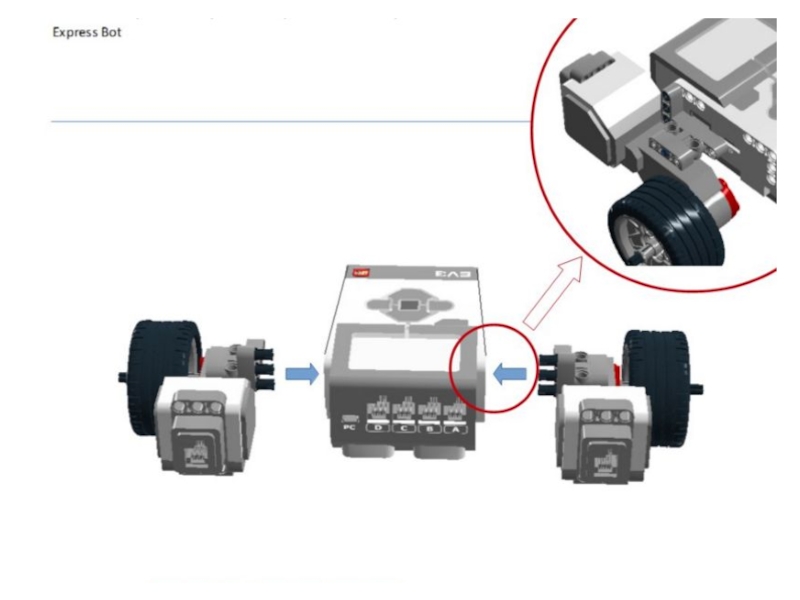
- 5. Express Bot
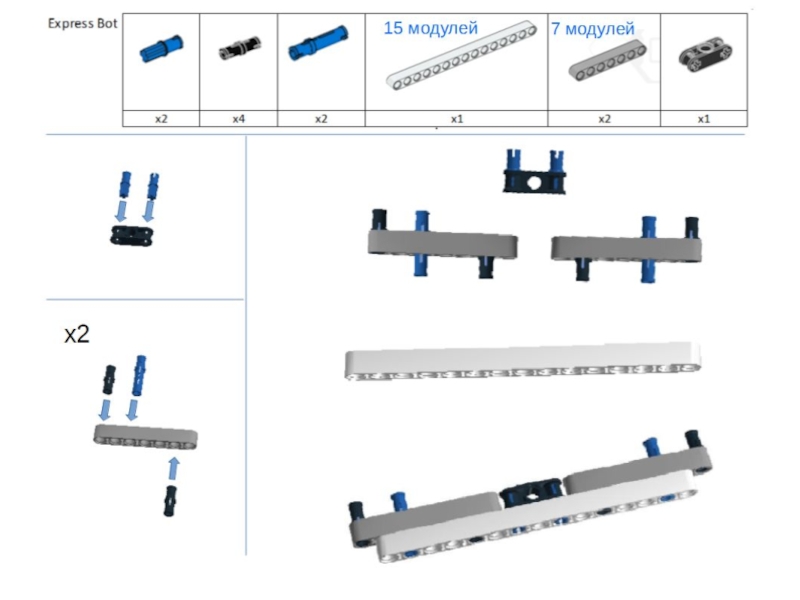
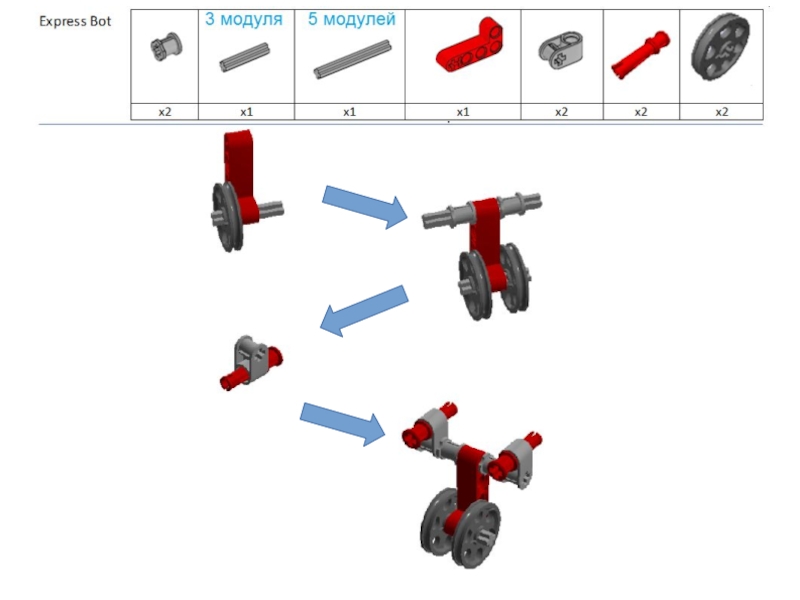
- 6. Основные детали, используемые в сборке.
- 16. Программирование
- 17. Рулевое управление
- 18. Скажите, как будут работать эти блоки?
- 19. Самостоятельное задание. «Первые шаги»
- 20. Сделать программу: Робот едет вперед 1
- 21. Решения:
- 22. Несколько действий в одной программе. «Паровозик»из блоков.
- 23. Самостоятельное задание. «Паровозик».
- 24. Сделать программу: Робот едет 180 градусов вперед
- 25. Решение:
- 26. Блок «Цикл» Предназначен для повторения каких-то действий,
- 27. Самостоятельное задание. «Квадрат!»
- 28. Сделать программу: 1) Робот ездит по квадрату.
- 29. Решение:
- 30. Блок «Ожидание» Блок ожидания заставляет нашего робота
- 31. Самостоятельное задание. Робот-пылесос
- 32. Сделать программу (перепрограммировать из «Квадрата»): Робот едет
- 34. **Самостоятельная задача. «Любопытный» робот.
- 35. Сделать программу: Робот постоянно крутится на месте пока не появится препятствие на расстоянии
- 36. Решение:


Слайд 3Правила
Соблюдаем тишину, когда преподаватель говорит
Непонятно – спроси!
Наборы не смешивать, все складывать
на место











Слайд 20Сделать программу:
Робот едет вперед 1 секунду с мощностью 75.
Робот крутится
на месте 3 секунды с максимальной мощностью.
Робот крадется назад с небольшой мощностью 5 оборотов.
Робот крадется назад с небольшой мощностью 5 оборотов.


Слайд 22Несколько действий в одной программе. «Паровозик»из блоков.
Мы можем делать программы таким
образом, чтобы после окончания одного действия, начиналось следующее. Для этого мы используем несколько программных блоков и соединяем их следующим образом:


Слайд 24Сделать программу:
Робот едет 180 градусов вперед с мощностью 35, после мчится
с максимальной скоростью один оборот назад.
«Большой квадрат». С помощью блоков рулевого управления собрать программу движения робота по квадрату.
(Поворот на 90 градусов)
«Большой квадрат». С помощью блоков рулевого управления собрать программу движения робота по квадрату.
(Поворот на 90 градусов)


Слайд 26Блок «Цикл»
Предназначен для повторения каких-то действий, находящихся в цикле. Может как
заканчиваться по какому-то условию, так и быть бесконечным.


Слайд 28Сделать программу:
1) Робот ездит по квадрату.
Условия:
1. Использование цикла.
2. Ограничение цикла. («Подсчет»)
3. Блок поворота на 90 градусов:
 Робот ездит по квадрату. Условия: 1. Использование цикла. 2. Ограничение цикла.")

Слайд 30Блок «Ожидание»
Блок ожидания заставляет нашего робота ждать, пока не случится какое-то
событие.
Запомните эту фразу «пока не», если она звучит, значит мы можем использовать блок ожидания.


Слайд 32Сделать программу (перепрограммировать из «Квадрата»):
Робот едет по прямой пока не увидит
препятствие на расстоянии меньше 20 см. Как только робот увидит препятствие он отворачивает на 90 градусов, после чего снова едет по прямой, пока не увидит препятствие.
:Робот едет по прямой пока не увидит препятствие на расстоянии меньше")


Слайд 35Сделать программу:
Робот постоянно крутится на месте пока не появится препятствие
на расстоянии <30 см после чего подъезжает к нему на расстояние 10 см и останавливается.
Дорабатываем программу. Робот-исследователь. После того, как робот подъехал на расстояние 10 см, он отъезжает задом, пока расстояние не станет больше 40см и снова начинает крутиться.
Дорабатываем программу. Робот-исследователь. После того, как робот подъехал на расстояние 10 см, он отъезжает задом, пока расстояние не станет больше 40см и снова начинает крутиться.