Алгоритмы
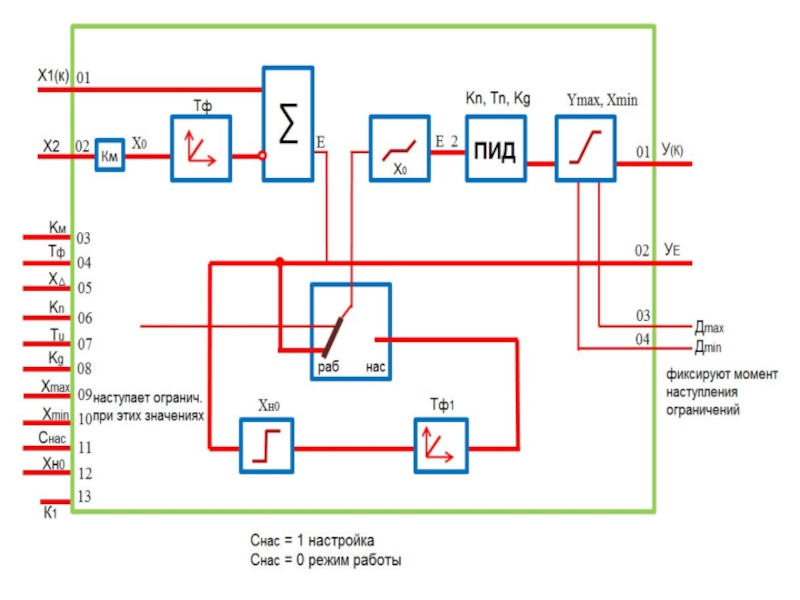
РАН – аналоговое рег. Звено, выделяющее сигнал рассогласования, который суммирует, фильтруется и инвертируется. Сигнал рассогласования Е на выходе этого звена
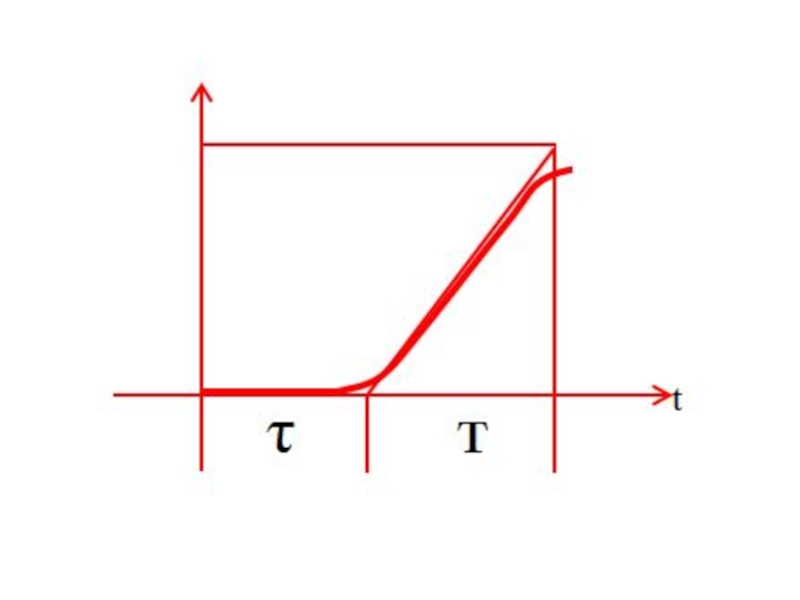
без фильтра . Фильтр нижних частот
Зона нечувствительности не пропускает на свой выход сигналы, значения которых находятся внутри значения зоны
- Главная
- Разное
- Дизайн
- Бизнес и предпринимательство
- Аналитика
- Образование
- Развлечения
- Красота и здоровье
- Финансы
- Государство
- Путешествия
- Спорт
- Недвижимость
- Армия
- Графика
- Культурология
- Еда и кулинария
- Лингвистика
- Английский язык
- Астрономия
- Алгебра
- Биология
- География
- Детские презентации
- Информатика
- История
- Литература
- Маркетинг
- Математика
- Медицина
- Менеджмент
- Музыка
- МХК
- Немецкий язык
- ОБЖ
- Обществознание
- Окружающий мир
- Педагогика
- Русский язык
- Технология
- Физика
- Философия
- Химия
- Шаблоны, картинки для презентаций
- Экология
- Экономика
- Юриспруденция
Программное обеспечение конроллеров. Алгоритмы презентация
Содержание
- 3. Алгоритм РАН может использоваться в качестве ПИД
- 4. При дискретном сигнале Снас=1 алгоритм переходит в
- 5. Алгоритм имеет модификатор m 40, который
- 6. В режиме ручного задания сигнал задания изменяется
- 7. Статическая балансировка действует только на узел ручного
- 8. Если включена динамическая балансировка Сдб=1, то при
- 9. Затем сигнал компенсации, с помощью которого выходной
- 10. m=0 программные задатчики отсутствуют m ≤ 40
- 11. ЗДЛ – задание локальное Алгоритм используется в
- 13. При переходе в локальный режим связь между
- 14. Алгоритм ЗДН является инициатором команды отключения. Эта
- 15. АНР – автонастройка регулятора. Алгоритм используется для
- 16. - настройка основана на анализе автоколебаний в
- 17. - настройка выполняется итеративным способом: анализируются параметры
- 18. Автоматический анализ колебаний: По сигналу Дкон=1
- 20. Последовательность действий при настройке: 1) выбирается один
- 21. 4) если автоматический расчет не используется: по
- 22. Аналоговый стандартный регулятор С помощью алгоритма
- 23. Аналоговый стабилизирующий регулятор
- 24. Сигнал на этом входе поступает не только
- 25. Алгоритм ОКО имеет два настроечных входа W0
- 26. Например, если регулируется температура которая может изменяться
- 27. Каскадные регуляторы Каскадный регулятор состоит из
- 28. Каскадный регулятор

Слайд 3Алгоритм РАН может использоваться в качестве
ПИД и П-регуляторов. В ПИД-регуляторах устанавливается
Для получения П-
Регулятора следует установить
Ограничитель ограничивает выходной сигнал алгоритма по max и min. Уровни ограничения устанавливаются коэффициентами
Алгоритм имеет 4 выхода: два из них
Фиксируют момент поступления ограничения выходного сигнала У.
Регулятора следует установить
Ограничитель ограничивает выходной сигнал алгоритма по max и min. Уровни ограничения устанавливаются коэффициентами
Алгоритм имеет 4 выхода: два из них
Фиксируют момент поступления ограничения выходного сигнала У.

Слайд 4При дискретном сигнале Снас=1 алгоритм переходит в режим настройки и в
замкнутом контуре регулирования устанавливаются автоколебания. Снас=0 – режим работы.
ЗДН – задание, для формирования сигнала ручного задания в контуре регулирования.
Алгоритм содержит узел ручного задания, узел динамической балансировки, переключатель вида задания и переключатель программ.
ЗДН – задание, для формирования сигнала ручного задания в контуре регулирования.
Алгоритм содержит узел ручного задания, узел динамической балансировки, переключатель вида задания и переключатель программ.

Слайд 5Алгоритм имеет модификатор m 40, который
определяет число независимых программных
задатчиков. Есл
программные задатчики
отсутствуют, то m=0.
С помощью переключателя вида задания
выбирается один из трех видов: ручное задание
РЗ, программное заданиеПЗ, внешнее задание
ВЗ. Для этого, вид задания можно было
изменять и с помощью клавиш, расположенных
на лицевой панели Р-130, к выходу
подключается вход алгоритма
ОКО(оперативный контроль).
отсутствуют, то m=0.
С помощью переключателя вида задания
выбирается один из трех видов: ручное задание
РЗ, программное заданиеПЗ, внешнее задание
ВЗ. Для этого, вид задания можно было
изменять и с помощью клавиш, расположенных
на лицевой панели Р-130, к выходу
подключается вход алгоритма
ОКО(оперативный контроль).

Слайд 6В режиме ручного задания сигнал задания изменяется вручную. В режиме программного
задания сигнал задания поступает со входов Xnpi. В режиме внешнего задания сигнал поступает с входа Хвн. Этот вход может быть подключен к входу любого алгоблока.

Слайд 7Статическая балансировка действует только на узел ручного задатчика. Если статическая балансировка
не включена Ссб=0, сигнал узла ручного задатчика при переключениях режима задания не изменяется (а также при отключении алгоритма). При включенной статической балансировке Ссб=1, отключенный узел РЗ отслеживает текущее задание (в режимах ПЗ и ВЗ); после выключения РЗ последние значение сигнала задания запоминается, но затем м/б изменено вручную.

Слайд 8Если включена динамическая балансировка Сдб=1, то при любых переключениях вида задания
и отключении алгоритма ЗДН командой обратного счета узел ДБ вырабатывает сигнал компенсации, с помощью которого выходит сигнал Уздн в первый момент после переключения сохраняется неизменным.

Слайд 9Затем сигнал компенсации, с помощью которого выходной сигнал Уздн в первый
момент после переключения сохраняется неизменным. Затем сигнал компенсации уменьшается по модулю до нуля с постоянной скоростью, задаваемой входом Yдб, при этом сигнал Уздн плавно переходит к текущему значению РЗ, ПЗ или ВЗ.

Слайд 10m=0 программные задатчики отсутствуют
m ≤ 40 есть до 40 программных задатчиков
ОКО
– оперативный контроль
Vдб – скорость уменьшения до нуля
Vдб – скорость уменьшения до нуля

Слайд 11ЗДЛ – задание локальное
Алгоритм используется в составе каскадного регулятора. Он необходим,
если должно предусматриваться переключение каскадного регулятора в локальный режим и ручное изменение задания ведомого регулятора.
Алгоритм включается между ведомым и ведущим регуляторами. Содержит узел ручного задания и переключатель режимов. В положении КУ (каскадное управление) сигнал на входе Х передается на его выход.
Алгоритм включается между ведомым и ведущим регуляторами. Содержит узел ручного задания и переключатель режимов. В положении КУ (каскадное управление) сигнал на входе Х передается на его выход.

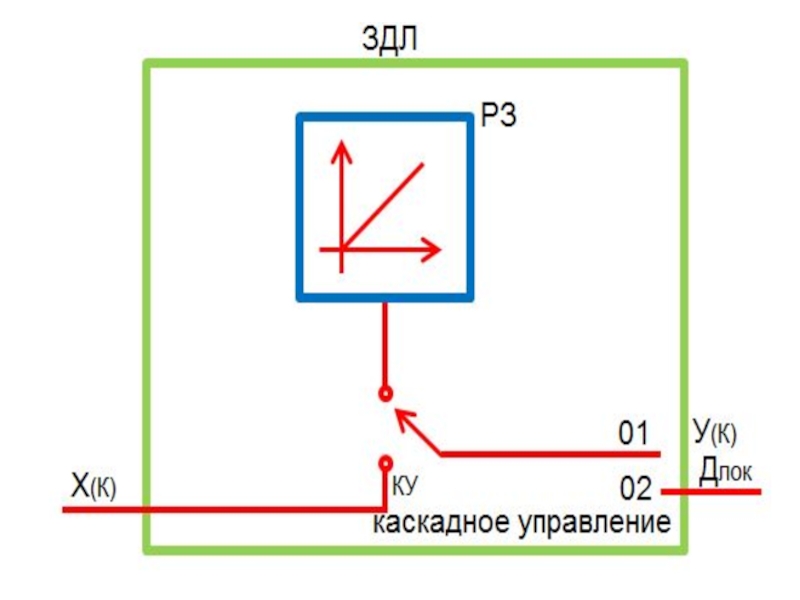
Слайд 13При переходе в локальный режим связь между ведущим и ведомыми регуляторами
разрывается и выходу Ук подключается узел РЗ. Это задание может изменяться вручную с помощью клавиш лицевой панели. В каскадном режиме на выходе Длок=0; в локальном Длок=1.

Слайд 14Алгоритм ЗДН является инициатором команды отключения. Эта команда формируется на каскадном
входе Х в том случае, когда установлен локальный режим управления. Эта команда вместе с значением начальных условий Х0=Y передается пред включенному алгоритму.
При каскадном режиме РЗ отслеживает текущее значение выходного сигнала алгоритма, так что переключение в локальный режим происходит безударно.
При каскадном режиме РЗ отслеживает текущее значение выходного сигнала алгоритма, так что переключение в локальный режим происходит безударно.

Слайд 15АНР – автонастройка регулятора. Алгоритм используется для автоматизации расчета динамической настройки
регулятора и применяется совместно с алгоритмами РАН и РИМ. АНР содержит три узла:
- выделения сигнала рассогласования и текущих значений Кп и Ти
- анализа параметров колебаний
- расчета параметров настройки;
После выделения значений Ɛ, Кп и Ти начинается анализ параметров колебаний по команде Спс=1.
- выделения сигнала рассогласования и текущих значений Кп и Ти
- анализа параметров колебаний
- расчета параметров настройки;
После выделения значений Ɛ, Кп и Ти начинается анализ параметров колебаний по команде Спс=1.

Слайд 16- настройка основана на анализе автоколебаний в контуре регулирования.
- для установки
автоколебаний РАН (РИМ) переводится в режим настройки, при этом контур не должен быть отключен (не переведен на ручной режим) и при колебаниях не должен достигаться порога ограничения.
- настройка выполняется для ПИ-закона регулирования. Если предполагается использовать ПИД-закон, то после определения Кп и Ти в РАН устанавливается Кg=Тg/Ти≈0.1…0.3. Кп – при этом увеличивается на 10 – 40%.
- настройка выполняется для ПИ-закона регулирования. Если предполагается использовать ПИД-закон, то после определения Кп и Ти в РАН устанавливается Кg=Тg/Ти≈0.1…0.3. Кп – при этом увеличивается на 10 – 40%.
 переводится")
Слайд 17- настройка выполняется итеративным способом: анализируются параметры колебаний для текущих параметров
настройки, по ним определяются новые параметры, эти параметры устанавливаются в алгоритме РАН (РИМ), после чего определяются новые параметры настройки, и так до тех пор, пока новые значения параметров Кп и Ти будут приблизительны текущим значениям. Обычно требуется 3-5 циклов итераций.

Слайд 18Автоматический анализ колебаний:
По сигналу Дкон=1 определяют конец анализа →(1 цикл). Амплитуда
и период колебаний считывают с помощью пульта настройки.
Возможна ручная оценка колебаний – пульт настройки + секундомер. Оцениваются Амн колебаний и период К2 и К3 – зависящие от τ/т и степени затухания М определяются по нрафикам.
По К2 и К3 рассчитывают АНР Кпр и Тир.
Возможна ручная оценка колебаний – пульт настройки + секундомер. Оцениваются Амн колебаний и период К2 и К3 – зависящие от τ/т и степени затухания М определяются по нрафикам.
По К2 и К3 рассчитывают АНР Кпр и Тир.
. Амплитуда и период колебаний считывают")
Слайд 20Последовательность действий при настройке:
1) выбирается один из трех вариантов настройки: ручная
оценка параметров колебаний, автоматический анализ параметров колебаний, автоматический расчет параметров настройки.
2) задается М или степень затухания ψ. Но ψ по графику определяется М.
3) Оценивается порядок объекта (1й или 2й) и τ/т.
2) задается М или степень затухания ψ. Но ψ по графику определяется М.
3) Оценивается порядок объекта (1й или 2й) и τ/т.
 выбирается один из трех вариантов настройки: ручная оценка параметров колебаний, автоматический")
Слайд 214) если автоматический расчет не используется: по графику определяются коэффициенты К1,
К2, К3. На входе устанавливаются К1 и Хно; после чего алгоритм переводится в режим настройки. Параметры колебаний определяются или вручную на выходе УƐ РАН или автоматически на выходах Ук и Тк АНР. Затем по формулам определяются Кпр и Тир.
5) если предполагается использовать автоматический расчет параметров настройки; на входе АНР устанавливаются К2 и К3, а рассчитанные параметры настройки фиксируются на выходе Кпр, Тир АНР.
5) если предполагается использовать автоматический расчет параметров настройки; на входе АНР устанавливаются К2 и К3, а рассчитанные параметры настройки фиксируются на выходе Кпр, Тир АНР.
 если автоматический расчет не используется: по графику определяются коэффициенты К1, К2, К3. На входе")
Слайд 22Аналоговый стандартный регулятор
С помощью алгоритма ОКО (опер. контроль) организуется оперативное управление.
Сигнал, поступающий на вход «здн» этого алгоритма всегда выводится на верхний цифровой индикатор «задание» лицевой панели. На нижний цифровой индикатор избирательного контроля в положении «вх», «Ɛ», «вых» поступают сигналы, приходящие на входы вх, Ɛ, ВР ОКО. «вх» - подключается к регулируемому параметру; ВР – выход регулятора.
 организуется оперативное управление. Сигнал, поступающий на вход")

Слайд 24Сигнал на этом входе поступает не только на нижний цифровой индикатор
в положении «вых», но и так же на шкальный индикатор. По шкальному индикатору ориентировочно (с разрешенной способностью 5%) контролируется выходной сигнал регулятора независимо от того, какой сигнал в данный момент выводится на цифровой индикатор избирательного контроля.

Слайд 25Алгоритм ОКО имеет два настроечных входа W0 и W100. На этих
входах задаются константы, определяющие технические единицы, в которых контролируется задание, входа Ɛ. Каждая из констант на входах W0 и W100 могут задаваться в диапазоне от -1999 до 9999 с шагом 1. Константа на входе W0 определяет число соответствующее 0% сигнала задания, входа и Ɛ, а константа на W100 – число, соответствующее 100% сигнала.

Слайд 26Например, если регулируется температура которая может изменяться от 600 до 1200С
и используется БУТ, настроенный т.о., что 600С – 0; а при 1200С – 5мА (100%), то W0=600, W100=1200.
Аналоговые сигналы вводятся в контроллер с помощью АЦП, однако, для того, чтобы «подключиться» к ним (АЦП), необходимо задействовать алгоритм ввода аналогового – ВАА (гр. А), ВАБ – гр.Б.
АВА (АВБ) – в них корректируется «нуль» и диапазон изменения выходного сигнала.
Аналоговые сигналы вводятся в контроллер с помощью АЦП, однако, для того, чтобы «подключиться» к ним (АЦП), необходимо задействовать алгоритм ввода аналогового – ВАА (гр. А), ВАБ – гр.Б.
АВА (АВБ) – в них корректируется «нуль» и диапазон изменения выходного сигнала.

Слайд 27Каскадные регуляторы
Каскадный регулятор состоит из ведущего и ведомого регуляторов. При переходе
в локальный режим ведущий регулятор безударно отключается, а задание ведомому регулятору устанавливается вручную с помощью алгоритма ЗДЛ. Возврат в каскадный режим выполняется также безударно. На рисунке заданы технические единицы для ведущего регулятора 0 (0%) и 1200 (100%), для ведомого – 10 (0%), и 50 (100%). В первом случае это могут быть градусы Цельсия, во втором – давление в атмосферах.