- Главная
- Разное
- Дизайн
- Бизнес и предпринимательство
- Аналитика
- Образование
- Развлечения
- Красота и здоровье
- Финансы
- Государство
- Путешествия
- Спорт
- Недвижимость
- Армия
- Графика
- Культурология
- Еда и кулинария
- Лингвистика
- Английский язык
- Астрономия
- Алгебра
- Биология
- География
- Детские презентации
- Информатика
- История
- Литература
- Маркетинг
- Математика
- Медицина
- Менеджмент
- Музыка
- МХК
- Немецкий язык
- ОБЖ
- Обществознание
- Окружающий мир
- Педагогика
- Русский язык
- Технология
- Физика
- Философия
- Химия
- Шаблоны, картинки для презентаций
- Экология
- Экономика
- Юриспруденция
Алгоритмы компьютерной графики. (Тема 3) презентация
Содержание
- 1. Алгоритмы компьютерной графики. (Тема 3)
- 2. План: 3.1. Общая характеристика алгоритмов машинной графики
- 3. Перенос Р(х, у) → Р'(х',у') x'=x+Dx y'=y+Dy
- 4. Пример:
- 5. Пример: Перенос контура домика на расстояние (3, -4)
- 6. Масштабирование Sx раз вдоль оси Ox Sy раз вдоль оси Oy x'=Sx·x y'=Sy·y
- 7. Пример:
- 8. Пример: Масштабирование контура домика: по оси Ох
- 9. Поворот x'=x·cosθ-y·sinθ y'=x·sinθ+y·cosθ θ R
- 10. Пример: P(6,1) P'(3.5,4.9)
- 11. Пример: Поворот квадрата на угол 30°
- 12. Преобразования в матричной форме: P'=P+D P'=P·S P'=P·R
- 13. В однородных координатах
- 14. Пример композиции
- 15. Пример:
- 16. Растрирование прямых
- 17. Алгоритмы растрирования прямой алгоритм цифрового дифференциального анализатора (ЦДА); алгоритм Брезенхема.
- 18. Схемы цепочного кодирования: 8-точечная 4-точечная
- 19. Растрирование эллипса Цепочный код растрирования эллипса: =
- 20. Алгоритм ЦДА (DDA – Digital Differential Analyzer)
- 21. Алгоритм ЦДА Основные расчетные формулы: Xi+1=Xi+Px Yi+1=Yi+Py
- 22. Алгоритм симметричного ЦДА Вычисление Px, Py X1=Xstart Y1=Ystart Вывод точки с коорд. (X1,Y1) X1
- 23. Пример генерации отрезка симметричным ЦДА
- 24. Алгоритм несимметричного ЦДА для Px>Py X1=Xstart Y1=Ystart Вывод точки с коорд. (X1,Y1) X1
- 25. Пример генерации отрезка несимметричным ЦДА
- 26. Алгоритм Брезенхема k < 1/2 k > 1/2 u v
- 27. Алгоритм Брезенхема d=2*v-u Вывод т. (X,Y) d0 u=u1 Да Нет
- 28. Пример генерации отрезка методом Брезенхема
- 29. Сравнение примеров для 2-х методов ЦДА Брезенхема
- 30. Методы заливки фигур: сканирование строк; затравочное заполнение
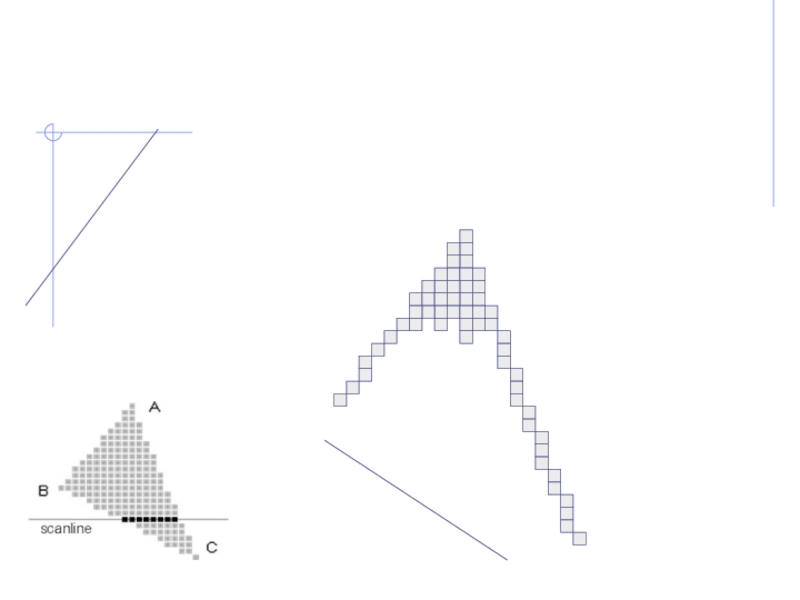
- 31. Метод сканирования строк
- 32. Метод сканирования строк XMin, XMax N
- 33. Алгоритм метода сканирования строк: XMax=0 XMin=N
- 35. Метод затравочного заполнения
- 36. Метод затравочного заполнения:
- 37. Алгоритм затравочного заполнения Piзатр → стек Стек
- 38. Удаление невидимых линий и поверхностей
- 39. Удаления невидимых линий: Метод Робертса; Метод Аппеля;
- 40. Метод Робертса
- 41. Алгоритм Робертса: отбрасываются все ребра, обе образующие
- 42. Метод Варнока внешним, если он целиком находится
- 43. Алгоритм Варнока (продолжение) Если все многоугольники сцены
- 44. Алгоритм Варнока (продолжение) Если только один многоугольник
- 45. Метод Аппеля
- 46. Алгоритм Аппеля: Определяется количественная невидимость вершины. Просматривается
- 47. Метод z-буфера
- 48. Алгоритм Z-буфера: Заполнить буфер кадра фоновым значением
- 49. Триангуляция Методы триангуляции: Делоне; Форчуна
- 50. Алгоритм триангуляции Берем три вершины A1, A2,
- 51. Алгоритм триангуляции Если оба условия выполняются, то
- 52. Практическая реализация

Слайд 2План:
3.1. Общая характеристика алгоритмов машинной графики
3.2. Преобразования координат
3.3. Методы растрирования в компьютерной
графике
3.4. Закрашивание фигур
3.5. Удаление невидимых линий
3.6. Триангуляция
3.4. Закрашивание фигур
3.5. Удаление невидимых линий
3.6. Триангуляция

 → Р'(х',у')x'=x+Dxy'=y+Dy[x' y']=[x y] + [Dx Dy]P'=P+DP(x,y)P'(x',y')DxDy")

")


Слайд 8Пример:
Масштабирование контура домика:
по оси Ох на (1/2);
по оси Оу на (2/3).
Масштабирование
контура домика:
по оси Ох на (1/2);
по оси Оу на (1/2).
по оси Ох на (1/2);
по оси Оу на (1/2).
;по оси Оу на (2/3).Масштабирование контура домика:по оси Ох")

P'(3.5,4.9)")






Слайд 17Алгоритмы растрирования прямой
алгоритм цифрового дифференциального анализатора (ЦДА);
алгоритм Брезенхема.
;алгоритм Брезенхема.")


")
Слайд 21Алгоритм ЦДА
Основные расчетные формулы:
Xi+1=Xi+Px
Yi+1=Yi+Py
где Py = Yend-Ystart – приращение координат отрезка
по оси Y;
Px = Xend-Xstart – приращение координат отрезка по оси X.
Px = Xend-Xstart – приращение координат отрезка по оси X.

Слайд 22Алгоритм симметричного ЦДА
Вычисление Px, Py
X1=Xstart Y1=Ystart
Вывод точки с коорд. (X1,Y1)
X1
точки с коорд. (X1,Y1)
Да
Нет
X1")

Слайд 24Алгоритм несимметричного ЦДА для Px>Py
X1=Xstart Y1=Ystart
Вывод точки с коорд. (X1,Y1)
X1
с коорд. (X1,Y1)
Да
Нет
X1")


d0u=u1ДаНет")





Слайд 33Алгоритм метода сканирования строк:
XMax=0 XMin=N
j=jmin..jmax
i=i1..i3
XMax[j]i
XMin[j]=i
да
да
нет
нет
Вывод отрезков
{(XMin[j],j), (XMax[j],j)}
, (XMax[j],j)}")


Слайд 37Алгоритм затравочного заполнения
Piзатр → стек
Стек не пуст
Извлечение Piсос
Вывод Pi на экран
Да
Нет
Стек
→ Pi, инициал. Pi
Piсос - гран., иниц.
Нет
Piсос → стек
Да


Слайд 39Удаления невидимых линий:
Метод Робертса;
Метод Аппеля;
Метод Варнока;
Метод Вейлера-Азертона;
метод Z-буфера;
метод построчного сканирования


Слайд 41Алгоритм Робертса:
отбрасываются все ребра, обе образующие грани которых являются нелицевыми;
проверяется каждое
из оставшихся ребер со всеми гранями многогранника на закрывание. При этом возможны три случая:

Слайд 42Метод Варнока
внешним, если он целиком находится вне окна;
внутренним, если он целиком
расположен внутри окна;
пересекающим, если он пересекает границу окна;
охватывающим, если окно целиком расположено внутри него.
пересекающим, если он пересекает границу окна;
охватывающим, если окно целиком расположено внутри него.

Слайд 43Алгоритм Варнока (продолжение)
Если все многоугольники сцены являются внешними по отношению к
окну, то оно пусто и изображается фоновым цветом.
Если только один многоугольник сцены является по отношению к окну внутренним, то оно заполняется фоновым цветом, а многоугольник заполняется своим цветом.
Если только один многоугольник сцены имеет общие точки с окном и является по отношению к нему пересекающим, то окно заполняется фоновым цветом, а часть многоугольника, принадлежащая окну, заполняется цветом многоугольника.
Если только один многоугольник сцены является по отношению к окну внутренним, то оно заполняется фоновым цветом, а многоугольник заполняется своим цветом.
Если только один многоугольник сцены имеет общие точки с окном и является по отношению к нему пересекающим, то окно заполняется фоновым цветом, а часть многоугольника, принадлежащая окну, заполняется цветом многоугольника.
Если все многоугольники сцены являются внешними по отношению к окну, то оно пусто")
Слайд 44Алгоритм Варнока (продолжение)
Если только один многоугольник охватывает окно и нет других
многоугольников, имеющих общие точки с окном, то окно заполняется цветом этого многоугольника.
Если существует хотя бы один многоугольник, охватывающий окно, то среди всех таких многоугольников выбирается тот, который расположен ближе всех многоугольников к точке наблюдения, и окно заполняется цветом этого многоугольника.
В противном случае производится новое разбиение окна.
Если существует хотя бы один многоугольник, охватывающий окно, то среди всех таких многоугольников выбирается тот, который расположен ближе всех многоугольников к точке наблюдения, и окно заполняется цветом этого многоугольника.
В противном случае производится новое разбиение окна.
Если только один многоугольник охватывает окно и нет других многоугольников, имеющих общие точки")

Слайд 46Алгоритм Аппеля:
Определяется количественная невидимость вершины.
Просматривается изменение количественной невидимости вдоль каждого из
ребер, выходящих из данной вершины.
Выполняется переход к следующей вершине и возврат к п. 1).
Если ребро выходит из вершины, принадлежащей контурной линии, проверяется, не закрывается ли это ребро одной из граней.
Выполняется переход к следующей вершине и возврат к п. 1).
Если ребро выходит из вершины, принадлежащей контурной линии, проверяется, не закрывается ли это ребро одной из граней.


Слайд 48Алгоритм Z-буфера:
Заполнить буфер кадра фоновым значением интенсивности или цвета.
Заполнить z-буфер минимальным значением z.
Преобразовать
каждый многоугольник в растровую форму в произвольном порядке.
Для каждого Пиксел(x,y) в многоугольнике вычислить его глубину z(x,y).
Сравнить глубину z(х,у) со значением Zбуфер(х,у), хранящимся в z-буфере в этой же позиции.
Если z(х,у) > Zбуфер (х,у), то записать атрибут этого многоугольника в буфер кадра и заменить Zбуфер(х,у) на z(х,у). В противном случае никаких действий не производить.
Для каждого Пиксел(x,y) в многоугольнике вычислить его глубину z(x,y).
Сравнить глубину z(х,у) со значением Zбуфер(х,у), хранящимся в z-буфере в этой же позиции.
Если z(х,у) > Zбуфер (х,у), то записать атрибут этого многоугольника в буфер кадра и заменить Zбуфер(х,у) на z(х,у). В противном случае никаких действий не производить.


Слайд 50Алгоритм триангуляции
Берем три вершины A1, A2, A3
Проверяем образуют ли векторы A1A3,
A1A2 и их векторное произведение левую тройку векторов.
Проверяем нет ли внутри треугольника A1A2A3 какой-либо из оставшихся вершин многоугольника.
Проверяем нет ли внутри треугольника A1A2A3 какой-либо из оставшихся вершин многоугольника.

Слайд 51Алгоритм триангуляции
Если оба условия выполняются, то строим треугольник A1A2A3, а вершину
A2 исключаем из многоугольника, не трогая вершину A1, сдвигаем вершины A2 (A2 на A3), A3 (A3 на A4)
Если хоть одно условие не выполняется, переходим к следующим трем вершинам.
Повторяем с 1 шага, пока не останется три вершины.
Если хоть одно условие не выполняется, переходим к следующим трем вершинам.
Повторяем с 1 шага, пока не останется три вершины.