ГРУППА
- Главная
- Разное
- Дизайн
- Бизнес и предпринимательство
- Аналитика
- Образование
- Развлечения
- Красота и здоровье
- Финансы
- Государство
- Путешествия
- Спорт
- Недвижимость
- Армия
- Графика
- Культурология
- Еда и кулинария
- Лингвистика
- Английский язык
- Астрономия
- Алгебра
- Биология
- География
- Детские презентации
- Информатика
- История
- Литература
- Маркетинг
- Математика
- Медицина
- Менеджмент
- Музыка
- МХК
- Немецкий язык
- ОБЖ
- Обществознание
- Окружающий мир
- Педагогика
- Русский язык
- Технология
- Физика
- Философия
- Химия
- Шаблоны, картинки для презентаций
- Экология
- Экономика
- Юриспруденция
Адаптивная фильтрация презентация
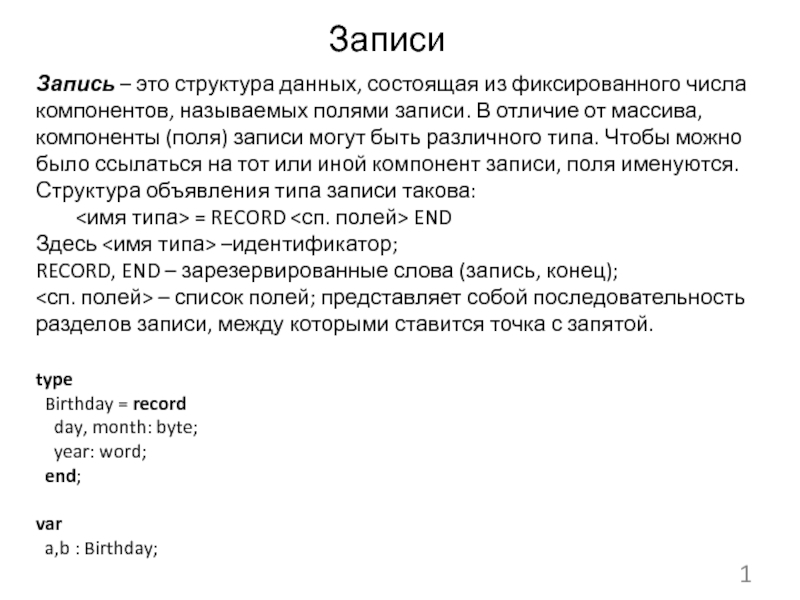
Содержание
- 1. Адаптивная фильтрация
- 2. ОСНОВНЫЕ ОБЛАСТИ ПРИМЕНЕНИЯ АДАПТИВНЫЕ ФИЛЬТРЫ –
- 3. НАИБОЛЕЕ РАСПРОСТРАНЕННЫЕ СХЕМЫ АДАПТИВНОЙ ФИЛЬТРАЦИИ СИГНАЛОВ АДАПТИВНЫЙ
- 4. АДАПТИВНЫЙ ШУМОПОДАВИТЕЛЬ ПОЛЕЗНЫЙ СИГНАЛ ОЦЕНИВАЕТСЯ ПО РАЗНОСТИ:
- 5. АДАПТИВНЫЙ ФИЛЬТР ВИНЕРА ФИЛЬТР ФОРМИРУЕТ ИЗ X(К)
- 6. В СТАЦИОНАРНОЙ СРЕДЕ ГРАФИК ЗАВИСИМОСТИ E ОТ
- 7. АДАПТИВНЫЙ АЛГОРИТМ НАИМЕНЬШИХ КВАДРАТОВ УИДРОУ-ХОПФА ПО СУЩЕСТВУ,
- 8. РЕКУРСИВНЫЕ СХЕМЫ НАИМЕНЬШИХ КВАДРАТОВ ОТЛИЧАЕТСЯ ТЕМ, ЧТО
- 9. СРАВНЕНИЕ РЕЗУЛЬТАТОВ ФИЛЬТРАЦИИ С ЗАДАННЫМИ ПАРАМЕТРАМИ (В ЦЕНТРЕ) И РЕЗУЛЬТАТОВ АДАПТИВНОЙ ФИЛЬТРАЦИИ (СПРАВА)
- 10. СРАВНЕНИЕ РЕЗУЛЬТАТОВ ФИЛЬТРАЦИИ В КОНФЛИКТНОЙ ЗОНЕ
- 11. ИТОГИ: НАИБОЛЕЕ ВАЖНОЙ ЧАСТЬЮ АДАПТИВНОГО КОМПЕНСАТОРА ПОМЕХ
- 12. СПИСОК ЛИТЕРАТУРЫ А.В. ДАВЫДОВ «ЦИФРОВАЯ ОБРАБОТКА СИГНАЛОВ»,
- 13. ВОПРОСЫ К ЗАЧЁТУ ТРИ ОСНОВНЫЕ ПРИЧИНЫ ПРИМЕНЕНИЯ

Слайд 2ОСНОВНЫЕ ОБЛАСТИ ПРИМЕНЕНИЯ
АДАПТИВНЫЕ ФИЛЬТРЫ – ЭТО ЦИФРОВЫЕ ФИЛЬТРЫ, КОТОРЫЕ СПОСОБНЫ
ИЗМЕНЯТЬ (НАСТРАИВАТЬ) СВОИ ХАРАКТЕРИСТИКИ С ПОМОЩЬЮ СПЕЦИАЛЬНЫХ АДАПТИВНЫХ АЛГОРИТМОВ.
ОЧИСТКА ДАННЫХ ОТ НЕСТАБИЛЬНЫХ МЕШАЮЩИХ СИГНАЛОВ И ШУМОВ
ПРИЧИНЫ:
ПОЛОСА ЧАСТОТ ШУМА НЕИЗВЕСТНА ИЛИ ИЗМЕНЯЕТСЯ СО ВРЕМЕНЕМ,
СПЕКТРЫ ПОЛЕЗНОГО СИГНАЛА И ШУМА (ПОМЕХИ) ПЕРЕКРЫВАЮТСЯ,
ХАРАКТЕРИСТИКИ ПОЛЕЗНОГО СИГНАЛА И ШУМОВ, КАНАЛОВ ПЕРЕДАЧИ ЯВЛЯЮТСЯ НЕСТАЦИОНАРНЫМИ.
ОЧИСТКА ДАННЫХ ОТ НЕСТАБИЛЬНЫХ МЕШАЮЩИХ СИГНАЛОВ И ШУМОВ
ПРИЧИНЫ:
ПОЛОСА ЧАСТОТ ШУМА НЕИЗВЕСТНА ИЛИ ИЗМЕНЯЕТСЯ СО ВРЕМЕНЕМ,
СПЕКТРЫ ПОЛЕЗНОГО СИГНАЛА И ШУМА (ПОМЕХИ) ПЕРЕКРЫВАЮТСЯ,
ХАРАКТЕРИСТИКИ ПОЛЕЗНОГО СИГНАЛА И ШУМОВ, КАНАЛОВ ПЕРЕДАЧИ ЯВЛЯЮТСЯ НЕСТАЦИОНАРНЫМИ.
 СВОИ ХАРАКТЕРИСТИКИ")
Слайд 3НАИБОЛЕЕ РАСПРОСТРАНЕННЫЕ СХЕМЫ АДАПТИВНОЙ ФИЛЬТРАЦИИ СИГНАЛОВ
АДАПТИВНЫЙ ШУМОПОДАВИТЕЛЬ
АДАПТИВНЫЙ ФИЛЬТР ВИНЕРА
АДАПТИВНЫЙ АЛГОРИТМ НАИМЕНЬШИХ
КВАДРАТОВ УИДРОУ-ХОПФА
РЕКУРСИВНЫЕ СХЕМЫ НАИМЕНЬШИХ КВАДРАТОВ
РЕКУРСИВНЫЕ СХЕМЫ НАИМЕНЬШИХ КВАДРАТОВ

Слайд 4АДАПТИВНЫЙ ШУМОПОДАВИТЕЛЬ
ПОЛЕЗНЫЙ СИГНАЛ ОЦЕНИВАЕТСЯ ПО РАЗНОСТИ:
Š(K) = Y(K) – Ğ(K) =
S(K) + G(K) – Ğ(K).
ВОЗВОДИМ УРАВНЕНИЕ В КВАДРАТ И ПОЛУЧАЕМ:
Š2(K) = S2(K) + (G(K) – Ğ(K))2 + 2.S(K) (G(K) – Ğ(K)).
ВЫЧИСЛИМ МАТЕМАТИЧЕСКОЕ ОЖИДАНИЕ ЛЕВОЙ И ПРАВОЙ ЧАСТИ ЭТОГО УРАВНЕНИЯ:
M[Š2(K)] = M[S2(K)] + M[(G(K) – Ğ(K))2] + 2M[S(K) (G(K) – Ğ(K)
ВОЗВОДИМ УРАВНЕНИЕ В КВАДРАТ И ПОЛУЧАЕМ:
Š2(K) = S2(K) + (G(K) – Ğ(K))2 + 2.S(K) (G(K) – Ğ(K)).
ВЫЧИСЛИМ МАТЕМАТИЧЕСКОЕ ОЖИДАНИЕ ЛЕВОЙ И ПРАВОЙ ЧАСТИ ЭТОГО УРАВНЕНИЯ:
M[Š2(K)] = M[S2(K)] + M[(G(K) – Ğ(K))2] + 2M[S(K) (G(K) – Ğ(K)
ПОСЛЕДНЕЕ СЛАГАЕМОЕ В ВЫРАЖЕНИИ РАВНО НУЛЮ, ПОСКОЛЬКУ СИГНАЛ S(K) НЕ КОРРЕЛИРУЕТ С СИГНАЛАМИ G(K) И Ğ(K).
M[Š2(K)] = M[S2(K)] + M[(G(K) – Ğ(K))2].
M[S2(K)] = W(S(K)) – МОЩНОСТЬ СИГНАЛА S(K),
M[Š2(K)] = W(Š(K)) – ОЦЕНКА МОЩНОСТИ СИГНАЛА S(K) И ОБЩАЯ ВЫХОДНАЯ МОЩНОСТЬ,
M[(G(K) – Ğ(K))2] = W(EG) - ОСТАТОЧНАЯ МОЩНОСТЬ ШУМА, КОТОРЫЙ МОЖЕТ СОДЕРЖАТЬСЯ В ВЫХОДНОМ СИГНАЛЕ.
MIN W(Š(K)) = W(S(K)) + MIN W(EG).
 = Y(K) – Ğ(K) = S(K) + G(K) –")
Слайд 5АДАПТИВНЫЙ ФИЛЬТР ВИНЕРА
ФИЛЬТР ФОРМИРУЕТ ИЗ X(К) СИГНАЛ Ğ(K) - ОПТИМАЛЬНУЮ ОЦЕНКУ
ТОЙ ЧАСТИ У(K), КОТОРАЯ КОРРЕЛИРОВАННА С X(K), И ВЫЧИТАЕТ ЕЕ ИЗ СИГНАЛА Y(K). ВЫХОДНОЙ СИГНАЛ:
E(K) = Y(K) - Ğ(K) = Y(K) – HTXK= Y(K) - ΣH(N) X(K-N),
ГДЕ HT И XK – ВЕКТОРЫ ВЕСОВЫХ КОЭФФИЦИЕНТОВ ФИЛЬТРА И ЕГО ВХОДНОГО СИГНАЛА.
E(K) = Y(K) - Ğ(K) = Y(K) – HTXK= Y(K) - ΣH(N) X(K-N),
ГДЕ HT И XK – ВЕКТОРЫ ВЕСОВЫХ КОЭФФИЦИЕНТОВ ФИЛЬТРА И ЕГО ВХОДНОГО СИГНАЛА.
Аналогично предыдущему методу, возводим в квадрат левую и правую части уравнения, находим математические ожидания обеих частей и получаем уравнение оптимизации e выходного сигнала:
e = s2 + 2PTH + HTRH,
где s2 = M[y2(k)] – дисперсия y(k),
P = M[y(k)Xk] – вектор взаимной корреляции,
R = M[XkXkT] – автокорреляционная матрица.
 СИГНАЛ Ğ(K) - ОПТИМАЛЬНУЮ ОЦЕНКУ ТОЙ ЧАСТИ У(K), КОТОРАЯ")
Слайд 6В СТАЦИОНАРНОЙ СРЕДЕ ГРАФИК ЗАВИСИМОСТИ E ОТ КОЭФФИЦИЕНТОВ H ПРЕДСТАВЛЯЕТ СОБОЙ
ЧАШЕОБРАЗНУЮ ПОВЕРХНОСТЬ АДАПТАЦИИ. ГРАДИЕНТ ПОВЕРХНОСТИ:
D = DE / DH = -2P + 2RH.
В ТОЧКЕ МИНИМУМА ГРАДИЕНТ РАВЕН НУЛЮ И ВЕКТОР ВЕСОВЫХ КОЭФФИЦИЕНТОВ ФИЛЬТРА ЯВЛЯЕТСЯ ОПТИМАЛЬНЫМ:
HOPT = R-1P (УРАВНЕНИЕ ВИНЕРА – ХОЛФА)
ЗАДАЧЕЙ АЛГОРИТМА АВТОМАТИЧЕСКОЙ НАСТРОЙКИ ЯВЛЯЕТСЯ ПОДБОР ТАКИХ ВЕСОВЫХ КОЭФФИЦИЕНТОВ ФИЛЬТРА, КОТОРЫЕ ОБЕСПЕЧИВАЮТ РАБОТУ В ОПТИМАЛЬНОЙ ТОЧКЕ ПОВЕРХНОСТИ АДАПТАЦИИ.
D = DE / DH = -2P + 2RH.
В ТОЧКЕ МИНИМУМА ГРАДИЕНТ РАВЕН НУЛЮ И ВЕКТОР ВЕСОВЫХ КОЭФФИЦИЕНТОВ ФИЛЬТРА ЯВЛЯЕТСЯ ОПТИМАЛЬНЫМ:
HOPT = R-1P (УРАВНЕНИЕ ВИНЕРА – ХОЛФА)
ЗАДАЧЕЙ АЛГОРИТМА АВТОМАТИЧЕСКОЙ НАСТРОЙКИ ЯВЛЯЕТСЯ ПОДБОР ТАКИХ ВЕСОВЫХ КОЭФФИЦИЕНТОВ ФИЛЬТРА, КОТОРЫЕ ОБЕСПЕЧИВАЮТ РАБОТУ В ОПТИМАЛЬНОЙ ТОЧКЕ ПОВЕРХНОСТИ АДАПТАЦИИ.

Слайд 7АДАПТИВНЫЙ АЛГОРИТМ НАИМЕНЬШИХ КВАДРАТОВ УИДРОУ-ХОПФА
ПО СУЩЕСТВУ, ЭТО МОДИФИКАЦИЯ ФИЛЬТРА ВИНЕРА, В
КОТОРОЙ ВМЕСТО ВЫЧИСЛЕНИЯ КОЭФФИЦИЕНТОВ ЗА ОДИН ШАГ ИСПОЛЬЗУЕТСЯ АЛГОРИТМ ПОСЛЕДОВАТЕЛЬНОГО СПУСКА В ОПТИМАЛЬНУЮ ТОЧКУ ПРИ ОБРАБОТКЕ КАЖДОЙ ВЫБОРКИ:
HK+1 = HK - MEK XK
EK = YK - HT XK
УСЛОВИЕ СХОДИМОСТИ К ОПТИМУМУ:
0 < M > 1/LMAX
ГДЕ M - ПАРАМЕТР СКОРОСТИ СПУСКА, LMAX – МАКСИМАЛЬНОЕ СОБСТВЕННОЕ ЗНАЧЕНИЕ КОВАРИАЦИОННОЙ МАТРИЦЫ ДАННЫХ.
НА ПРАКТИКЕ ТОЧКА МАКСИМАЛЬНОЙ ОПТИМАЛЬНОСТИ ФЛЮКТУИРУЕТ ОКОЛО ТЕОРЕТИЧЕСКИ ВОЗМОЖНОЙ. ЕСЛИ ВХОДНОЙ СИГНАЛ НЕСТАЦИОНАРНЫЙ, ТО ИЗМЕНЕНИЕ СТАТИСТИК СИГНАЛА ДОЛЖНО ПРОИСХОДИТЬ ДОСТАТОЧНО МЕДЛЕННО, ЧТОБЫ КОЭФФИЦИЕНТЫ ФИЛЬТРА УСПЕВАЛИ СЛЕДИТЬ ЗА ЭТИМИ ИЗМЕНЕНИЯМИ.
HK+1 = HK - MEK XK
EK = YK - HT XK
УСЛОВИЕ СХОДИМОСТИ К ОПТИМУМУ:
0 < M > 1/LMAX
ГДЕ M - ПАРАМЕТР СКОРОСТИ СПУСКА, LMAX – МАКСИМАЛЬНОЕ СОБСТВЕННОЕ ЗНАЧЕНИЕ КОВАРИАЦИОННОЙ МАТРИЦЫ ДАННЫХ.
НА ПРАКТИКЕ ТОЧКА МАКСИМАЛЬНОЙ ОПТИМАЛЬНОСТИ ФЛЮКТУИРУЕТ ОКОЛО ТЕОРЕТИЧЕСКИ ВОЗМОЖНОЙ. ЕСЛИ ВХОДНОЙ СИГНАЛ НЕСТАЦИОНАРНЫЙ, ТО ИЗМЕНЕНИЕ СТАТИСТИК СИГНАЛА ДОЛЖНО ПРОИСХОДИТЬ ДОСТАТОЧНО МЕДЛЕННО, ЧТОБЫ КОЭФФИЦИЕНТЫ ФИЛЬТРА УСПЕВАЛИ СЛЕДИТЬ ЗА ЭТИМИ ИЗМЕНЕНИЯМИ.

Слайд 8РЕКУРСИВНЫЕ СХЕМЫ НАИМЕНЬШИХ КВАДРАТОВ
ОТЛИЧАЕТСЯ ТЕМ, ЧТО ВЫЧИСЛЕНИЕ КАЖДОЙ ПОСЛЕДУЮЩЕЙ ВЫБОРКИ КОЭФФИЦИЕНТОВ
H(N) ПРОИЗВОДИТСЯ НЕ ТОЛЬКО ПО КОЭФФИЦИЕНТАМ ТОЛЬКО ОДНОЙ ПРЕДЫДУЩЕЙ ВЫБОРКИ, НО И С ОПРЕДЕЛЕННОЙ ДЛИНОЙ ПОСТЕПЕННО ЗАТУХАЮЩЕЙ ПАМЯТИ ПО ПРЕДШЕСТВУЮЩИМ ВЫБОРКАМ, ЧТО ПОЗВОЛЯЕТ СНИЖАТЬ ФЛЮКТУАЦИИ ОЦЕНОК ПРИ ОБРАБОТКЕ СТАЦИОНАРНЫХ СИГНАЛОВ.
ИМЕЕТ ЗНАЧИТЕЛЬНО БОЛЕЕ ВЫСОКУЮ ВЫЧИСЛИТЕЛЬНУЮ СЛОЖНОСТЬ, НО ОДНОВРЕМЕННО БОЛЬШУЮ СКОРОСТЬ СХОДИМОСТИ (БЫСТРОДЕЙСТВИЕ) И ТОЧНОСТЬ.
ИМЕЕТ ЗНАЧИТЕЛЬНО БОЛЕЕ ВЫСОКУЮ ВЫЧИСЛИТЕЛЬНУЮ СЛОЖНОСТЬ, НО ОДНОВРЕМЕННО БОЛЬШУЮ СКОРОСТЬ СХОДИМОСТИ (БЫСТРОДЕЙСТВИЕ) И ТОЧНОСТЬ.
 ПРОИЗВОДИТСЯ НЕ ТОЛЬКО")
Слайд 9СРАВНЕНИЕ РЕЗУЛЬТАТОВ ФИЛЬТРАЦИИ С ЗАДАННЫМИ ПАРАМЕТРАМИ (В ЦЕНТРЕ) И РЕЗУЛЬТАТОВ АДАПТИВНОЙ
ФИЛЬТРАЦИИ (СПРАВА)
 И РЕЗУЛЬТАТОВ АДАПТИВНОЙ ФИЛЬТРАЦИИ (СПРАВА)")

Слайд 11ИТОГИ:
НАИБОЛЕЕ ВАЖНОЙ ЧАСТЬЮ АДАПТИВНОГО КОМПЕНСАТОРА ПОМЕХ ЯВЛЯЕТСЯ УСТРОЙСТВО УПРАВЛЕНИЯ ВЕСОВЫМИ КОЭФФИЦИЕНТАМИ
- ЛИНЕЙНЫЙ ФИЛЬТР, ЧЕРЕЗ КОТОРЫЙ ПРОПУСКАЕТСЯ ОПОРНЫЙ СИГНАЛ .
ЗАДАЧА АДАПТИВНОЙ КОМПЕНСАЦИИ ПОМЕХИ СВОДИТСЯ К ПОДБОРУ КОЭФФИЦИЕНТОВ ФИЛЬТРА ТАКИМ ОБРАЗОМ, ЧТОБЫ МИНИМИЗИРОВАТЬ ЭНЕРГИЮ СИГНАЛА НА ВЫХОДЕ КОМПЕНСАТОРА . В ЭТОМ СЛУЧАЕ БУДЕТ МАКСИМИЗИРОВАНО ВЫХОДНОЕ ОТНОШЕНИЕ СИГНАЛ/ШУМ. МИНИМИЗАЦИЯ ЭНЕРГИИ ОБЫЧНО ОСУЩЕСТВЛЯЕТСЯ НА ОСНОВЕ ГРАДИЕНТНЫХ МЕТОДОВ ПОИСКА ЭКСТРЕМУМА ФУНКЦИЙ МНОГИХ ПЕРЕМЕННЫХ.
ИЗВЕСТНО, ЧТО АДАПТИВНЫЕ КОМПЕНСАТОРЫ ПОМЕХ ПОЗВОЛЯЮТ ЗНАЧИТЕЛЬНО УЛУЧШИТЬ КАЧЕСТВО ЗАШУМЛЕННЫХ СИГНАЛОВ, НО ТРЕБОВАНИЕ НАЛИЧИЯ ОПОРНОГО СИГНАЛА СУЩЕСТВЕННО СУЖАЕТ ИХ ОБЛАСТЬ ПРИМЕНЕНИЯ.
ЗАДАЧА АДАПТИВНОЙ КОМПЕНСАЦИИ ПОМЕХИ СВОДИТСЯ К ПОДБОРУ КОЭФФИЦИЕНТОВ ФИЛЬТРА ТАКИМ ОБРАЗОМ, ЧТОБЫ МИНИМИЗИРОВАТЬ ЭНЕРГИЮ СИГНАЛА НА ВЫХОДЕ КОМПЕНСАТОРА . В ЭТОМ СЛУЧАЕ БУДЕТ МАКСИМИЗИРОВАНО ВЫХОДНОЕ ОТНОШЕНИЕ СИГНАЛ/ШУМ. МИНИМИЗАЦИЯ ЭНЕРГИИ ОБЫЧНО ОСУЩЕСТВЛЯЕТСЯ НА ОСНОВЕ ГРАДИЕНТНЫХ МЕТОДОВ ПОИСКА ЭКСТРЕМУМА ФУНКЦИЙ МНОГИХ ПЕРЕМЕННЫХ.
ИЗВЕСТНО, ЧТО АДАПТИВНЫЕ КОМПЕНСАТОРЫ ПОМЕХ ПОЗВОЛЯЮТ ЗНАЧИТЕЛЬНО УЛУЧШИТЬ КАЧЕСТВО ЗАШУМЛЕННЫХ СИГНАЛОВ, НО ТРЕБОВАНИЕ НАЛИЧИЯ ОПОРНОГО СИГНАЛА СУЩЕСТВЕННО СУЖАЕТ ИХ ОБЛАСТЬ ПРИМЕНЕНИЯ.

Слайд 12СПИСОК ЛИТЕРАТУРЫ
А.В. ДАВЫДОВ «ЦИФРОВАЯ ОБРАБОТКА СИГНАЛОВ», 2005
В.И.ДЖИГАН «АДАПТИВНЫЕ ФИЛЬТРЫ. СОВРЕМЕННЫЕ СРЕДСТВА
МОДЕЛИРОВАНИЯ И ПРИМЕРЫ РЕАЛИЗАЦИИ», 2012
В.И.ДЖИГАН «АДАПТИВНАЯ ФИЛЬТРАЦИЯ: ТЕОРИЯ И АЛГОРИТМЫ», 2013
МАТЕРИАЛ ИЗ НАЦИОНАЛЬНОЙ БИБЛИОТЕКИ ИМ. Н. Э. БАУМАНА «АДАПТИВНАЯ ФИЛЬТРАЦИЯ ЦИФРОВЫХ ДАННЫХ», 2016
В.И.ДЖИГАН «АДАПТИВНАЯ ФИЛЬТРАЦИЯ: ТЕОРИЯ И АЛГОРИТМЫ», 2013
МАТЕРИАЛ ИЗ НАЦИОНАЛЬНОЙ БИБЛИОТЕКИ ИМ. Н. Э. БАУМАНА «АДАПТИВНАЯ ФИЛЬТРАЦИЯ ЦИФРОВЫХ ДАННЫХ», 2016

Слайд 13ВОПРОСЫ К ЗАЧЁТУ
ТРИ ОСНОВНЫЕ ПРИЧИНЫ ПРИМЕНЕНИЯ АДАПТИВНЫХ ФИЛЬТРОВ
НАИБОЛЕЕ РАСПРОСТРАНЕННЫЕ СХЕМЫ АДАПТИВНОЙ
ФИЛЬТРАЦИИ СИГНАЛОВ
СХЕМА УСТРОЙСТВА АДАПТИВНОГО ШУМОПОДАВИТЕЛЯ
СХЕМА УСТРОЙСТВА АДАПТИВНОГО ШУМОПОДАВИТЕЛЯ