радіотехніка”
- Главная
- Разное
- Дизайн
- Бизнес и предпринимательство
- Аналитика
- Образование
- Развлечения
- Красота и здоровье
- Финансы
- Государство
- Путешествия
- Спорт
- Недвижимость
- Армия
- Графика
- Культурология
- Еда и кулинария
- Лингвистика
- Английский язык
- Астрономия
- Алгебра
- Биология
- География
- Детские презентации
- Информатика
- История
- Литература
- Маркетинг
- Математика
- Медицина
- Менеджмент
- Музыка
- МХК
- Немецкий язык
- ОБЖ
- Обществознание
- Окружающий мир
- Педагогика
- Русский язык
- Технология
- Физика
- Философия
- Химия
- Шаблоны, картинки для презентаций
- Экология
- Экономика
- Юриспруденция
Статистична радіотехніка. Оптимальний прийом сигналів. Апостеріорна щільність ймовірності параметрів радіосигналу презентация
Содержание
- 1. Статистична радіотехніка. Оптимальний прийом сигналів. Апостеріорна щільність ймовірності параметрів радіосигналу
- 2. 8.3. Апостеріорна щільність ймовірності параметрів радіосигналу
- 3. Нехай сигнал залежить від одного
- 4. Відповідно до теореми множення ймовірностей
- 5. Тоді формулу (8.17) можна записати в остаточному
- 6. Якщо сигнал залежить від безперервних параметрів
- 7. Позначимо осереднені за елементарний інтервал часу значення
- 8. Випадкові величини ni є нормально розподіленими й,
- 9. При дискретному спостереженні функцію правдоподібності у формулі
- 10. Щоб перейти до випадку неперервного спостереження, потрібно
- 11. Таким чином, при неперервній обробці
- 12. Розглянемо на прикладі процедуру формування апостеріорної щільності
- 13. Враховуючи, що енергія сигналу можна
- 14. Множник exp(-E/N0) можна також включити в постійну
- 15. Права частина формули (8.41) з точністю до
- 16. 8.4. Кореляційний прийом випадкових сигналів Знайдемо основні
- 17. Функція qs(τ), що одержана на виході кореляційного
- 18. Визначальне розходження між сигнальною й шумовою функціями
- 19. Формула (8.46) показує, що шумова функція формується
- 20. З формул (8.47) і (8.49) видно, що
- 21. Величина Q, яка рівна відношенню подвоєної енергії
- 22. Порівнюючи підінтегральні вирази у формулах (8.45) і

Слайд 28.3. Апостеріорна щільність ймовірності параметрів радіосигналу
Обробка й аналіз прийнятого коливання
можуть здійснюватися двома методами: дискретним і неперервним.
Під час дискретної обробки вибіркові значення прийнятого коливання ξ(t) описуються спільними щільностями ймовірності корисного сигналу та шуму відповідно
Під час дискретної обробки вибіркові значення прийнятого коливання ξ(t) описуються спільними щільностями ймовірності корисного сигналу та шуму відповідно
Тема 8. ОПТИМАЛЬНИЙ ПРИЙОМ СИГНАЛІВ

Слайд 3Нехай сигнал
залежить від одного невідомого неперервного параметра λ, що має
апріорну щільність ймовірності fpr(λ).
Всі відомості, які можна отримати про параметр після приймання коливання ξ(t), укладені в умовній щільності ймовірності, яка є апостеріорною щільністю ймовірності
Всі відомості, які можна отримати про параметр після приймання коливання ξ(t), укладені в умовній щільності ймовірності, яка є апостеріорною щільністю ймовірності
(8.14)
(8.15)
.Всі")
Слайд 4Відповідно до теореми множення ймовірностей
Розглянута як функція від λ, умовна
щільність ймовірності
по суті є функцією правдоподібності.
по суті є функцією правдоподібності.
(8.16)
(8.17)
(8.18)

Слайд 5Тоді формулу (8.17) можна записати в остаточному вигляді
Формула (8.19) являє
математичний запис теореми Байєса.
Якщо параметр λ є дискретним і може приймати тільки одне з декількох можливих значень λi із апріорними ймовірностями ppr(λi), то апостеріорні ймовірності цих значень визначаються за формулою
Якщо параметр λ є дискретним і може приймати тільки одне з декількох можливих значень λi із апріорними ймовірностями ppr(λi), то апостеріорні ймовірності цих значень визначаються за формулою
(8.19)
(8.20)
(8.21)
(8.22)
 можна записати в остаточному вигляді Формула (8.19) являє математичний запис теореми Байєса.Якщо")
Слайд 6Якщо сигнал залежить від безперервних параметрів
то формула (8.19) буде мати
вигляд
Розглянемо випадок, коли прийняте коливання являє собою адитивну суміш корисного сигналу й нормального білого шуму. Нехай здійснюються дискретні спостереження, коли відлики беруться через рівновіддалені моменти часу. Розіб'ємо інтервал спостереження рівновіддаленими точками Δ=ti-ti-1.
Розглянемо випадок, коли прийняте коливання являє собою адитивну суміш корисного сигналу й нормального білого шуму. Нехай здійснюються дискретні спостереження, коли відлики беруться через рівновіддалені моменти часу. Розіб'ємо інтервал спостереження рівновіддаленими точками Δ=ti-ti-1.
(8.23)
(8.24)
 буде мати вигляд Розглянемо випадок, коли")
Слайд 7Позначимо осереднені за елементарний інтервал часу значення коливання, сигналу й шуму
відповідно через
(8.25)
(8.26)
(8.27)
(8.28)
(8.26)(8.27)(8.28)")
Слайд 8Випадкові величини ni є нормально розподіленими й, згідно (8.27), мають наступні
характеристики:
, мають наступні характеристики:")
Слайд 9При дискретному спостереженні функцію правдоподібності у формулі (8.23) потрібно вважати рівною
Для сигналу, що залежить від декількох параметрів, функція правдоподібності
(8.29)
(8.30)
 потрібно вважати рівною Для сигналу, що залежить")
Слайд 10Щоб перейти до випадку неперервного спостереження, потрібно у формулах (8.29) і
(9.30) перейти до межі Δ→0
Здійснюючи граничний перехід, отримаємо
Здійснюючи граничний перехід, отримаємо
(8.31)
(8.32)
(8.33)
 і (9.30) перейти до межі")
Слайд 11Таким чином, при неперервній обробці
При вирішенні основних задач оптимального прийому оперують
також з відношенням правдоподібності. Воно являє собою відношення функцій (при дискретній обробці) або функціоналів (при безперервній обробці) правдоподібності при наявності й відсутності сигналу
(8.34)
(8.35)

Слайд 12Розглянемо на прикладі процедуру формування апостеріорної щільності ймовірності параметрів радіосигналу й
з'ясуємо якісний вплив на її значення окремих факторів.
Потрібно на основі аналізу прийнятого коливання радара
визначити з мінімальною похибкою величину τ.
При цьому
Потрібно на основі аналізу прийнятого коливання радара
визначити з мінімальною похибкою величину τ.
При цьому
(8.37)
(8.36)

(8.39)(8.40)")
Слайд 14Множник exp(-E/N0) можна також включити в постійну k, тоді
Звідси випливає,
що при відомій апріорній щільності ймовірності й спектральній інтенсивності N0 визначення апостеріорної щільності ймовірності еквівалентно знаходженню функції q(τ).
(8.41)
 можна також включити в постійну k, тоді Звідси випливає, що при відомій апріорній")
Слайд 15Права частина формули (8.41) з точністю до постійного множника відтворює вираз
для кореляційної функції між ξ(t) і S(t-τ). Тому функція q(τ) характеризує міру взаємної кореляції між прийнятим коливанням ξ(t) і корисним сигналом S(t-τ). Відповідно до цього пристрій для формування q(τ) називається кореляційним приймачем. Така назва зберігається при вимірюванні будь-якого параметра сигналу, а не тільки часового запізнювання τ. Загальний вираз для одержання q(τ) має вигляд
(8.42)
 з точністю до постійного множника відтворює вираз для кореляційної функції між")
Слайд 168.4. Кореляційний прийом випадкових сигналів
Знайдемо основні ймовірнісні характеристики на виході кореляційного
приймача. Нехай істинне значення параметра τ в прийнятій реалізації ξ(t) дорівнює τ0, тобто
Підставивши цей вираз ξ(t) в (8.42), функцію q(τ) можна представити у вигляді суми двох доданків
Підставивши цей вираз ξ(t) в (8.42), функцію q(τ) можна представити у вигляді суми двох доданків
(8.43)
(8.44)

Слайд 17Функція qs(τ), що одержана на виході кореляційного приймача, являє собою «автокореляційну
функцію» вхідного корисного сигналу й називається сигнальною функцією. Якщо в прийнятому коливанні ξ(t) корисний сигнал відсутній, то сигнальна функція дорівнює нулю. Функція qn(τ) на виході приймача обумовлена шумом і є «взаємокореляційною функцією» між шумом й вхідним корисним сигналом, яка називається шумовою функцією.
(8.45)
(8.46)
, що одержана на виході кореляційного приймача, являє собою «автокореляційну функцію» вхідного корисного сигналу")
Слайд 18Визначальне розходження між сигнальною й шумовою функціями полягає в тому, що
перша при кожному фіксованому значенні є детермінованою, а друга – випадковою.
Розглянемо характер сигнальної й шумової функцій. Сигнальна функція має максимум при τ=τ0, що дорівнює
Розглянемо характер сигнальної й шумової функцій. Сигнальна функція має максимум при τ=τ0, що дорівнює
(8.47)

Слайд 19Формула (8.46) показує, що шумова функція формується з нормального білого шуму
в результаті лінійного перетворення. Тому при кожному фіксованому значенні τ вона має нормальну щільність ймовірності з параметрами
(8.48)
(8.49)
 показує, що шумова функція формується з нормального білого шуму в результаті лінійного перетворення.")
Слайд 20З формул (8.47) і (8.49) видно, що відношення найбільшого значення сигнальної
функції до середнього квадратичного значення шумової функції дорівнює
Максимальне значення сигнальної функції й дисперсія шумової функції дорівнюють однієї й тій же величині
Максимальне значення сигнальної функції й дисперсія шумової функції дорівнюють однієї й тій же величині
(8.50)
(8.51)
 і (8.49) видно, що відношення найбільшого значення сигнальної функції до середнього квадратичного")
Слайд 21Величина Q, яка рівна відношенню подвоєної енергії сигналу до спектральної інтенсивності
шуму, називається відношенням сигнал/шум по потужності на вході приймача.
Для з'ясування характеру зміни шумової функції залежно від τ знайдемо кореляційну функцію qn(τ). Скориставшись формулами (8.46) і (8.13), отримаємо
Для з'ясування характеру зміни шумової функції залежно від τ знайдемо кореляційну функцію qn(τ). Скориставшись формулами (8.46) і (8.13), отримаємо
(8.52)

Слайд 22Порівнюючи підінтегральні вирази у формулах (8.45) і (8.52), можна зробити висновок,
що вони за характером однакові. Отже, кореляційна функція для qn(τ) за формою подібна сигнальної функції qs(τ) і являє собою автокореляційну функцію сигналу на вході.
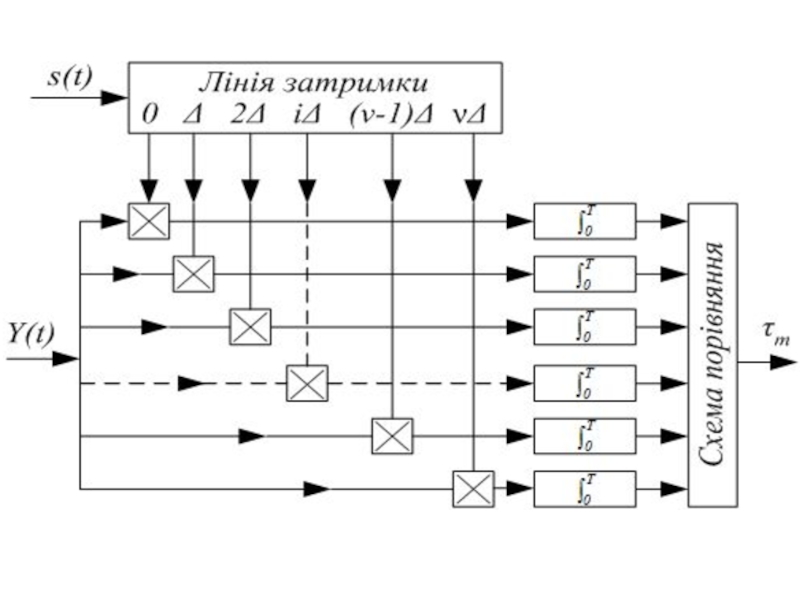
На практиці взаємокореляційну функцію q(τ) для декількох фіксованих значень τ можна отримати за допомогою простого кореляційного приймача (рис.).
На практиці взаємокореляційну функцію q(τ) для декількох фіксованих значень τ можна отримати за допомогою простого кореляційного приймача (рис.).
 і (8.52), можна зробити висновок, що вони за характером")