- Главная
- Разное
- Дизайн
- Бизнес и предпринимательство
- Аналитика
- Образование
- Развлечения
- Красота и здоровье
- Финансы
- Государство
- Путешествия
- Спорт
- Недвижимость
- Армия
- Графика
- Культурология
- Еда и кулинария
- Лингвистика
- Английский язык
- Астрономия
- Алгебра
- Биология
- География
- Детские презентации
- Информатика
- История
- Литература
- Маркетинг
- Математика
- Медицина
- Менеджмент
- Музыка
- МХК
- Немецкий язык
- ОБЖ
- Обществознание
- Окружающий мир
- Педагогика
- Русский язык
- Технология
- Физика
- Философия
- Химия
- Шаблоны, картинки для презентаций
- Экология
- Экономика
- Юриспруденция
Датчики. Датчики крутящего момента. Датчики уровня презентация
Содержание
- 1. Датчики. Датчики крутящего момента. Датчики уровня
- 2. Датчики крутящего момента Первый способ определения крутящего
- 3. Тензорезисторный датчик крутящего момента
- 4. Телеметрический тензорезисторный датчик
- 5. Второй способ. Измерение угла закручивания
- 6. Фотоэлектрический датчик крутящего момента Индукционный датчик крутящего момента
- 7. Датчики уровня Дифференциально-трансформаторный поплавковый датчик уровня
- 8. Индуктивный поплавковый датчик уровня
- 9. Электромеханический поплавковый датчик уровня Мембранный датчик уровня
- 10. Емкостной цилиндрический датчик уровня а) для диэлектрических
- 11. Поплавковый сигнализатор уровня рычажного типа Принцип действия Внешний вид сигнализатора «Mobrey»
- 12. Устройство сигнализатора «Mobrey»
- 13. Омический датчик уровня проводящей жидкости
- 14. Сельсин − специальная электрическая машина переменного тока,
- 15. Электрическая схема сельсина uв = Um sin
- 16. Бесконтактный сельсин
- 17. Индикаторный режим работы сельсина Схема соединения сельсинов
- 18. Определение токов Уравнения для контуров токов U0п
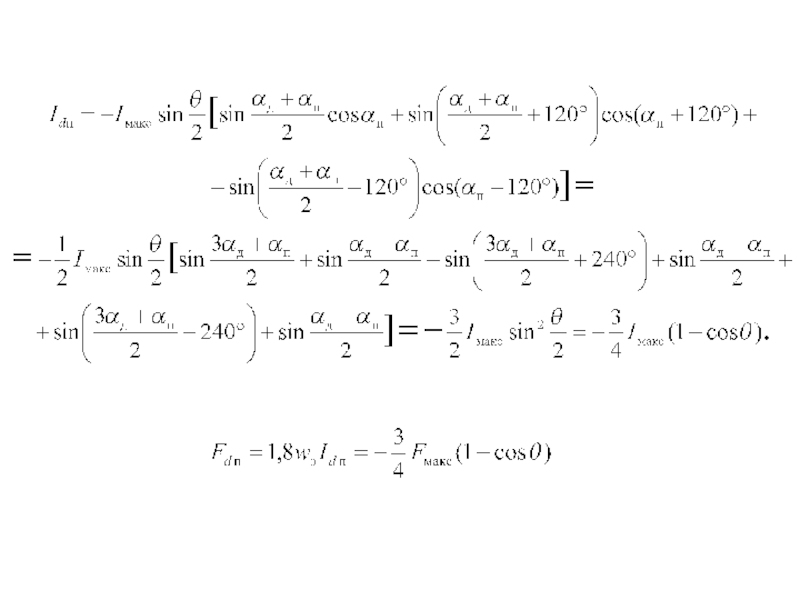
- 19. Разложение МДС на составляющие МДС фазы Продольная составляющая МДС приемника
- 21. Поперечная составляющая МДС
- 22. Определение синхронизирующего момента Мгновенное значение синхронизирующего момента
- 23. Трансформаторный режим работы Токи фаз:
- 24. Следящая система с сельсинами в трансформаторном режиме
- 25. Вращающиеся трансформаторы Вращающийся трансформатор (ВТ) − электрическая
- 26. Синусно-косинусный ВТ Работа СКВТ при холостом ходе
- 27. Работа СКВТ при нагрузке Поперечная составляющая потока
- 28. ЛВТ с первичным симметрированием Линейный ВТ Использование
- 29. Датчики давления Упругие чувствительные элементы: а)
- 30. Примеры датчиков давления а) с потенциометрическим преобразователем;
- 31. Электроконтактный манометр
- 32. Датчики расхода Расход – объем или масса
- 33. Расходомеры переменного перепада давления Уравнение Бернулли (1)
- 34. Объемный расход несжимаемой жидкости
- 35. Расходомеры постоянного перепада давления Сила тяжести поплавка
- 36. Объемные счетчики (расходомеры) Счетчик с овальными шестернями Лопастной счетчик
- 37. Тахометрические расходомеры Угловая скорость крыльчатки
- 38. Электромагнитные (индукционные) расходомеры ЭДС между электродами при

Слайд 2Датчики крутящего момента
Первый способ определения крутящего момента ― измерение напряжений на
поверхности вала
Для сплошного вала
Для полого вала
Для сплошного вала
Для полого вала



Слайд 5Второй способ. Измерение угла закручивания
Для сплошного вала
где G – модуль
сдвига
Для полого вала
Для полого вала





Слайд 10Емкостной цилиндрический датчик уровня а) для диэлектрических жидкостей; б) для проводящих жидкостей;
в) зависимость емкости от уровня
 для диэлектрических жидкостей; б) для проводящих жидкостей; в) зависимость емкости")
Слайд 11Поплавковый сигнализатор уровня рычажного типа
Принцип действия
Внешний вид сигнализатора «Mobrey»



Слайд 14Сельсин − специальная электрическая машина переменного тока, предназначенная для дистанционной синхронной
передачи угла поворота или вращения.
Обмотка возбуждения: однофазная или трехфазная.
Обмотка синхронизации: трехфазная.
Режимы работы сельсина:
индикаторный: датчик поворачивается принудительно, а приемник устанавливается в согласованное с датчиком положение под воздействием собственного синхронизирующего момента;
трансформаторный: датчик поворачивается принудительно, а приемник вырабатывает напряжение, являющееся функцией угла рассогласования между датчиком и приемником.
Обмотка возбуждения: однофазная или трехфазная.
Обмотка синхронизации: трехфазная.
Режимы работы сельсина:
индикаторный: датчик поворачивается принудительно, а приемник устанавливается в согласованное с датчиком положение под воздействием собственного синхронизирующего момента;
трансформаторный: датчик поворачивается принудительно, а приемник вырабатывает напряжение, являющееся функцией угла рассогласования между датчиком и приемником.
Сельсины

Слайд 15Электрическая схема сельсина
uв = Um sin ωt
Фв = Фm sin (ωt
– π/2)
В исходном положении (α = 0)
E1 = Eмакс = 4,44fwэФm
Е2 = Емакс cos 120° = – Емакс /2
Е3 = Емакс cos 240° = – Емакс /2
При повороте ротора на угол α
Е1 = Емакс cos α;
Е2 = Емакс cos (α + 120°);
Е3 = Емакс cos (α + 240°)
В исходном положении (α = 0)
E1 = Eмакс = 4,44fwэФm
Е2 = Емакс cos 120° = – Емакс /2
Е3 = Емакс cos 240° = – Емакс /2
При повороте ротора на угол α
Е1 = Емакс cos α;
Е2 = Емакс cos (α + 120°);
Е3 = Емакс cos (α + 240°)
В исходном положении")

Слайд 17Индикаторный режим работы сельсина
Схема соединения сельсинов
ЭДС датчика
Ед1 = Емакс cos αд;
Ед2
= Емакс cos (αд + 120°);
Ед3 = Емакс cos (αд + 240°)
ЭДС приемника
Еп1 = Емакс cos αп;
Еп2 = Емакс cos (αп + 120°);
Еп3 = Емакс cos (αп + 240°)
Результирующие ЭДС фаз
Ед3 = Емакс cos (αд + 240°)
ЭДС приемника
Еп1 = Емакс cos αп;
Еп2 = Емакс cos (αп + 120°);
Еп3 = Емакс cos (αп + 240°)
Результирующие ЭДС фаз

Слайд 18Определение токов
Уравнения для контуров токов
U0п = Е1д – Е1п +I1 2Z;
U0п
= Е2д – Е2п +I2 2Z;
U0п = Е3д – Е3п +I3 2Z,
Сумма уравнений
3U0п = Е1д + Е2д + Е3д – (Е1п + Е2п + Е3п) + (I1 + I2+ I3) 2Z.
Вывод: потенциал нейтрали приемника U0п = 0
Токи:
U0п = Е3д – Е3п +I3 2Z,
Сумма уравнений
3U0п = Е1д + Е2д + Е3д – (Е1п + Е2п + Е3п) + (I1 + I2+ I3) 2Z.
Вывод: потенциал нейтрали приемника U0п = 0
Токи:



Слайд 22Определение синхронизирующего момента
Мгновенное значение синхронизирующего момента
mс.п = с Фв fqп
где с
− конструктивная постоянная;
Фв – мгновенное значение потока обмотки возбуждения;
Тогда
Среднее значение синхронизирующего момента
Фв – мгновенное значение потока обмотки возбуждения;
Тогда
Среднее значение синхронизирующего момента

Слайд 23Трансформаторный режим работы
Токи фаз:
Продольная составляющая МДС:
Поперечная составляющая МДС:
Выходная ЭДС:
Выходная ЭДС с
учетом сдвига:


Слайд 25Вращающиеся трансформаторы
Вращающийся трансформатор (ВТ) − электрическая микромашина переменного тока, служащая для
преобразования угла поворота ротора в напряжение. В зависимости от закона изменения выходного напряжения ВТ подразделяются на следующие типы:
синусно-косинусные ВТ (СКВТ): два выходных напряжения, одно из которых пропорционально синусу угла поворота ротора, а другое – косинусу угла;
линейные ВТ (ЛВТ): выходное напряжение изменяется по закону, близкому к линейному, в определенном диапазоне изменения угла;
масштабные ВТ: выходное напряжение изменяется пропорционально входному, а коэффициент пропорциональности определяется углом поворота ротора.
синусно-косинусные ВТ (СКВТ): два выходных напряжения, одно из которых пропорционально синусу угла поворота ротора, а другое – косинусу угла;
линейные ВТ (ЛВТ): выходное напряжение изменяется по закону, близкому к линейному, в определенном диапазоне изменения угла;
масштабные ВТ: выходное напряжение изменяется пропорционально входному, а коэффициент пропорциональности определяется углом поворота ротора.
Схема ВТ:
 − электрическая микромашина переменного тока, служащая для преобразования угла поворота ротора")
Слайд 26Синусно-косинусный ВТ
Работа СКВТ при холостом ходе
Ев = 4,44 f wс.э Фdm
Еs0 = 4,44 f wp.э Фdm sin
α
Еc0 = 4,44 f wp.э Фdm cos α
Es0 = kEв sin α; Ec0 = kEв cos α,
где k = wр.э /wс.э − коэффициент трансформации СКВТ.
Работа СКВТ при нагрузке
Еc0 = 4,44 f wp.э Фdm cos α
Es0 = kEв sin α; Ec0 = kEв cos α,
где k = wр.э /wс.э − коэффициент трансформации СКВТ.
Работа СКВТ при нагрузке

Слайд 27Работа СКВТ при нагрузке
Поперечная составляющая потока
ЭДС самоиндукции синусной обмотки
Выражая F через
I, а I через Es, получаем:
Полная ЭДС синусной обмотки
Отсюда находим ЭДС синусной обмотки:
Полная ЭДС синусной обмотки
Отсюда находим ЭДС синусной обмотки:
Разложение МДС
синусной обмотки
по осям

Слайд 28ЛВТ с первичным симметрированием
Линейный ВТ
Использование зависимости sin α ≈ α
Аппроксимация зависимостью
При
-60° < α < 60° k = 0,536.
Напряжение сети
Отсюда магнитный поток
ЭДС синусной обмотки
Напряжение сети
Отсюда магнитный поток
ЭДС синусной обмотки

Слайд 29Датчики давления
Упругие чувствительные элементы:
а) мембрана; б) мембранная коробка;
в) сильфон;
г) трубка Бурдона
 мембрана; б) мембранная коробка; в) сильфон; г) трубка Бурдона")
Слайд 30Примеры датчиков давления
а) с потенциометрическим преобразователем;
б) с индуктивным преобразователем;
в) дифференциальный датчик
давления.
 с потенциометрическим преобразователем;б) с индуктивным преобразователем;в) дифференциальный датчик давления.")

Слайд 32Датчики расхода
Расход – объем или масса вещества, проходящие через определенное сечение
в единицу времени.
Датчики расхода делятся на расходомеры и счетчики.
Наибольшее применение нашли:
расходомеры переменного и постоянного перепада давления;
объемные счетчики и расходомеры;
тахометрические расходомеры ;
электромагнитные (индукционные) расходомеры.
Датчики расхода делятся на расходомеры и счетчики.
Наибольшее применение нашли:
расходомеры переменного и постоянного перепада давления;
объемные счетчики и расходомеры;
тахометрические расходомеры ;
электромагнитные (индукционные) расходомеры.

Слайд 33Расходомеры переменного перепада давления
Уравнение Бернулли
(1)
Уравнение неразрывности струи
F1w1 = F2w2 (2)
F2 = μF0 (3)
Из
(1 – 3) получаем
где m = F0/F1.
При измерении давления у диафрагмы
где m = F0/F1.
При измерении давления у диафрагмы
Уравнение неразрывности струиF1w1 = F2w2 (2)F2 = μF0 (3)Из (1 – 3) получаемгде")
Слайд 34Объемный расход несжимаемой жидкости
Массовый расход
Достоинство расходомеров переменного перепада давления –
сравнительно высокая точность измерения.
Недостатки:
потеря энергии потока;
трудность измерения в пульсирующих потоках и при наличии примеси
Недостатки:
потеря энергии потока;
трудность измерения в пульсирующих потоках и при наличии примеси

Слайд 35Расходомеры постоянного перепада давления
Сила тяжести поплавка
P = Vп g (ρп –
ρ)
Подъемная сила
R = (p1 – р2)F0
В установившемся режиме P = R, поэтому
Скорость протекания жидкости
откуда
Приравнивая два выражения для Δр, получаем:
Объемный расход Q = αwFк.
Так как практически w = const, то Q пропорционально высоте подъема поплавка
Подъемная сила
R = (p1 – р2)F0
В установившемся режиме P = R, поэтому
Скорость протекания жидкости
откуда
Приравнивая два выражения для Δр, получаем:
Объемный расход Q = αwFк.
Так как практически w = const, то Q пропорционально высоте подъема поплавка
Подъемная силаR = (p1")
Счетчик с овальными шестернямиЛопастной счетчик")

Слайд 38Электромагнитные (индукционные) расходомеры
ЭДС между электродами при постоянном магнитном потоке
При переменном магнитном
потоке
 расходомерыЭДС между электродами при постоянном магнитном потокеПри переменном магнитном потоке")